La primera misión china a Marte, en órbita desde 2021 y con el rover Zhurong que estudió la superficie en Utopia Planitia
Misión en curso
Objetivos:
Órbita y Superficie de Marte
Nave espacial:
Orbitador Tianwen 1 y rover Zhurong
Fecha de lanzamiento:
23 de julio de 2020
Lanzador:
Larga Marcha 5 (CZ-5)
Lugar de lanzamiento:
Wenchang, isla de Hainán (China)
Control de misión:
CNSA
La misión Tianwen 1 marcó el inicio de la exploración interplanetaria de China. Su nombre, que puede traducirse como “Preguntas al cielo”, procede de un poema clásico del siglo IV a.C. de Qu Yuan y simboliza la búsqueda del conocimiento más allá del mundo terrestre. Se trata de la primera expedición china a Marte y la primera en combinar en un solo lanzamiento un orbitador, un módulo de descenso y un vehículo de exploración en superficie.
El conjunto fue diseñado para estudiar de forma coordinada la atmósfera, la superficie y el subsuelo del planeta, además de demostrar las capacidades tecnológicas necesarias para futuras misiones de retorno de muestras. La sonda fue lanzada el 23 de julio de 2020 mediante un cohete Larga Marcha 5 desde el centro espacial de Wenchang, en la isla de Hainán, y se insertó en órbita marciana el 10 de febrero de 2021, tras un viaje interplanetario de más de seis meses.
A bordo viajaban el orbitador Tianwen 1 y el rover Zhurong, ambos con instrumentación científica independiente. El orbitador asumió las funciones de observación global y retransmisión de datos, mientras que el módulo de descenso transportaba al rover para su aterrizaje en la planicie de Utopia Planitia. El 14 de mayo de 2021 China se convirtió en el segundo país del mundo en lograr un aterrizaje operativo en Marte, y el primero en hacerlo con éxito al primer intento.
La misión consolidó la autonomía tecnológica del programa espacial chino en operaciones interplanetarias y estableció las bases para un programa marciano de largo plazo. Además de su valor tecnológico, Tianwen 1 ha aportado información científica relevante sobre la estructura interna, la morfología superficial y el entorno atmosférico de Marte, situando a China entre las potencias que exploran de forma sistemática el planeta rojo.
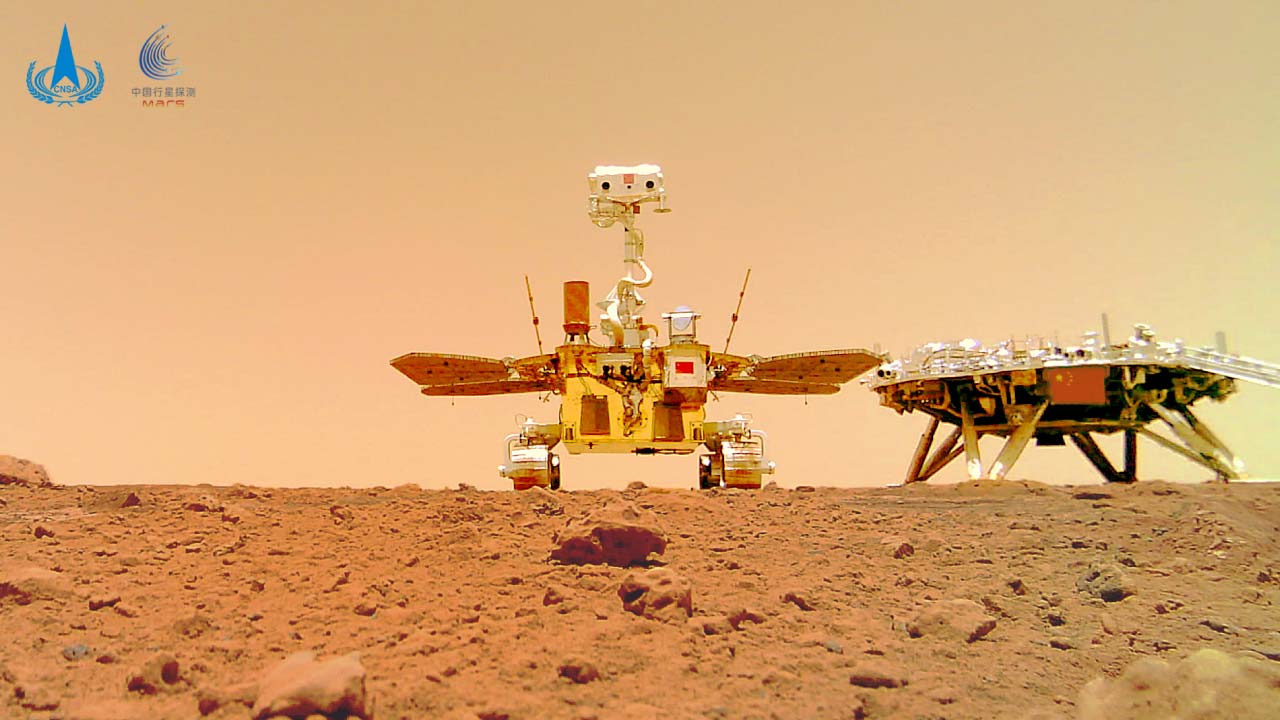
El rover Zhurong y la etapa de descenso de la misión Tianwen 1 en Utopia Planitia, fotografiados por una cámara desplegable el 1 de junio de 2021. Créditos: CNSA 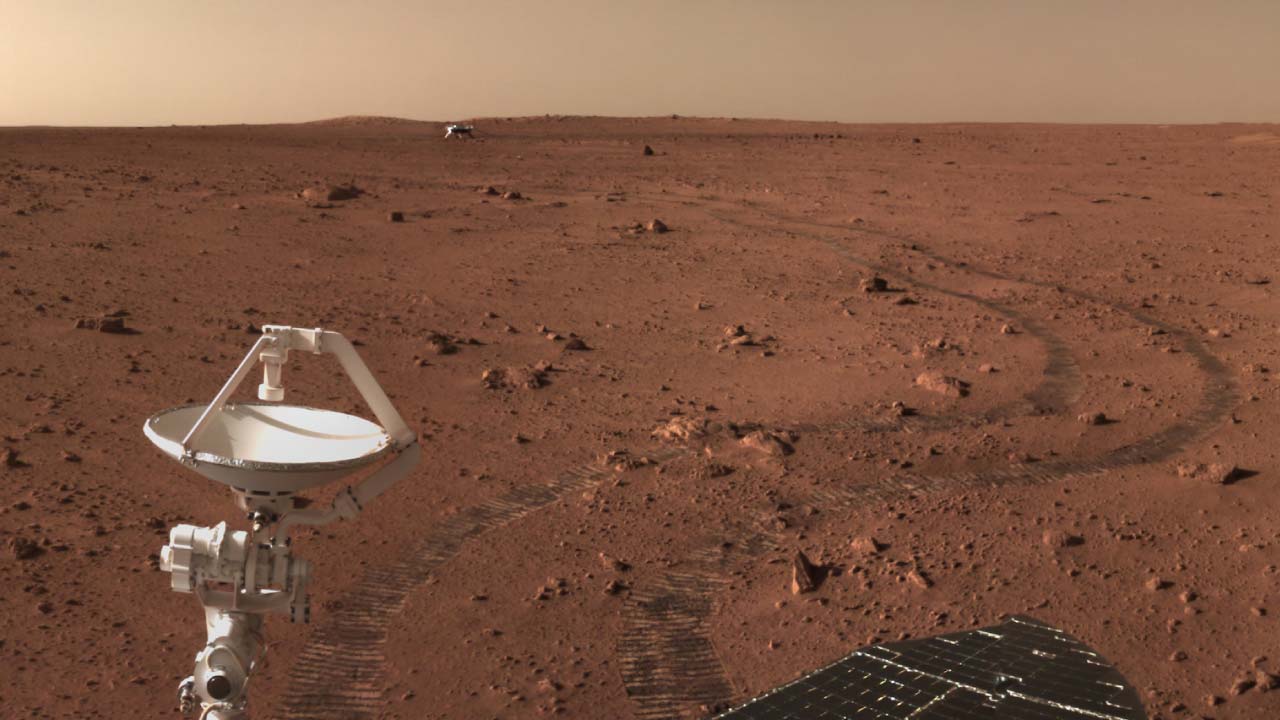
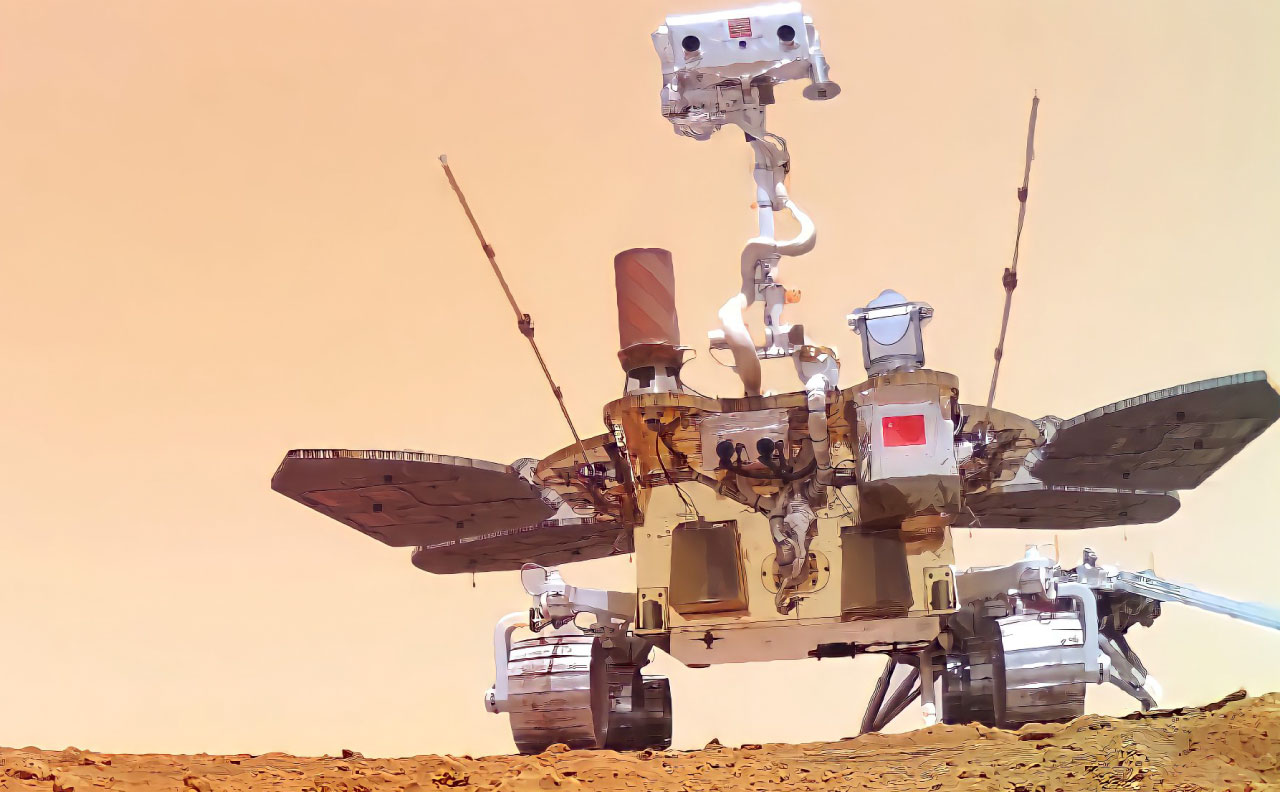
El rover Zhurong durante sus primeras semanas de exploración en Utopia Planitia. En la distancia se aprecia la etapa de descenso de la misión Tianwen 1. Créditos: CNSA 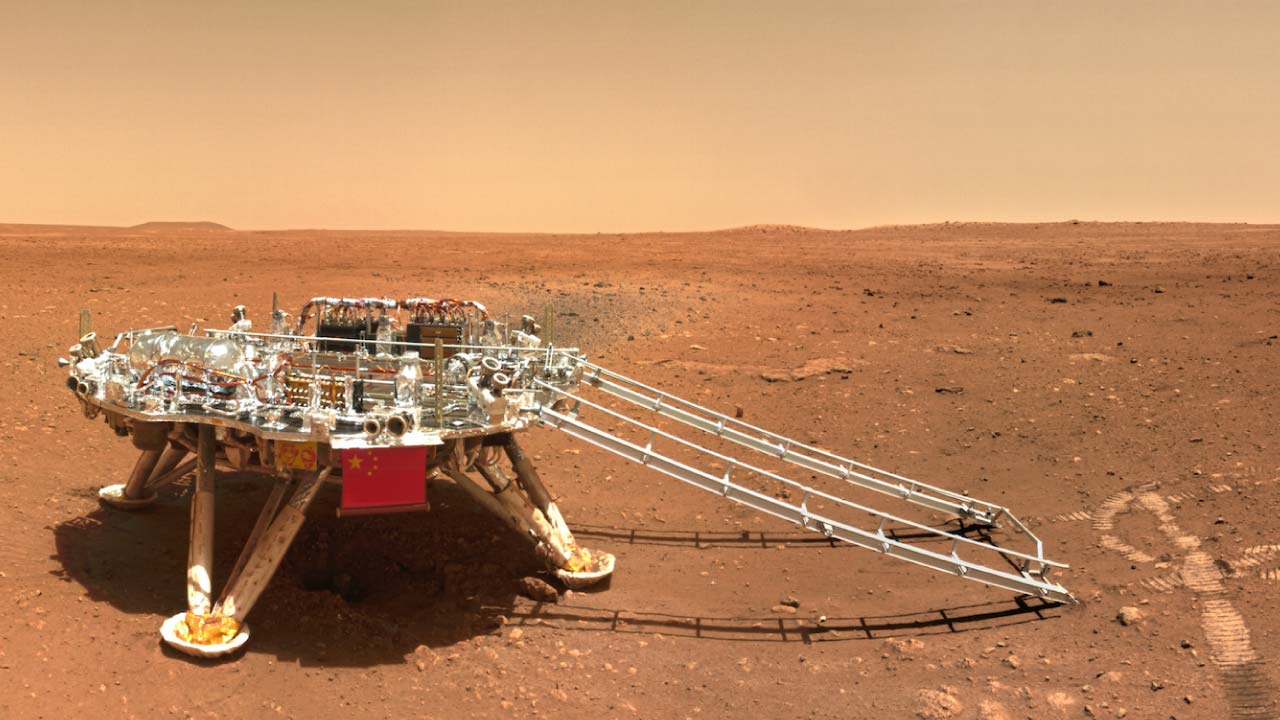
La etapa de descenso de la misión Tianwen 1 en la superficie de Utopia Planitia tras el aterrizaje del 14 de mayo de 2021. Créditos: CNSA.
Objetivos de la misión Tianwen 1 en Marte
La misión Tianwen 1 tuvo como propósito demostrar la capacidad de China para llevar a cabo una exploración completa de Marte, desde la inserción orbital hasta el aterrizaje y las operaciones en superficie. Fue el primer intento del país de combinar en una sola misión un orbitador, un módulo de descenso y un vehículo móvil, con el fin de validar las tecnologías necesarias para futuras misiones interplanetarias y de retorno de muestras.
En el plano científico, la misión buscaba estudiar de forma conjunta la atmósfera, la superficie y el subsuelo de Marte. El orbitador se encargaría de obtener datos globales sobre la morfología, la estructura geológica y el entorno de plasma del planeta, además de actuar como enlace de comunicaciones con el módulo de descenso.
El rover Zhurong, por su parte, tenía el objetivo de analizar el terreno en la planicie de Utopia Planitia, investigar la composición y estructura del suelo y realizar observaciones meteorológicas y magnéticas locales. Su trabajo en superficie debía complementar las observaciones del orbitador, ofreciendo una visión integrada del entorno marciano.
Características de la misión Tianwen 1 en Marte
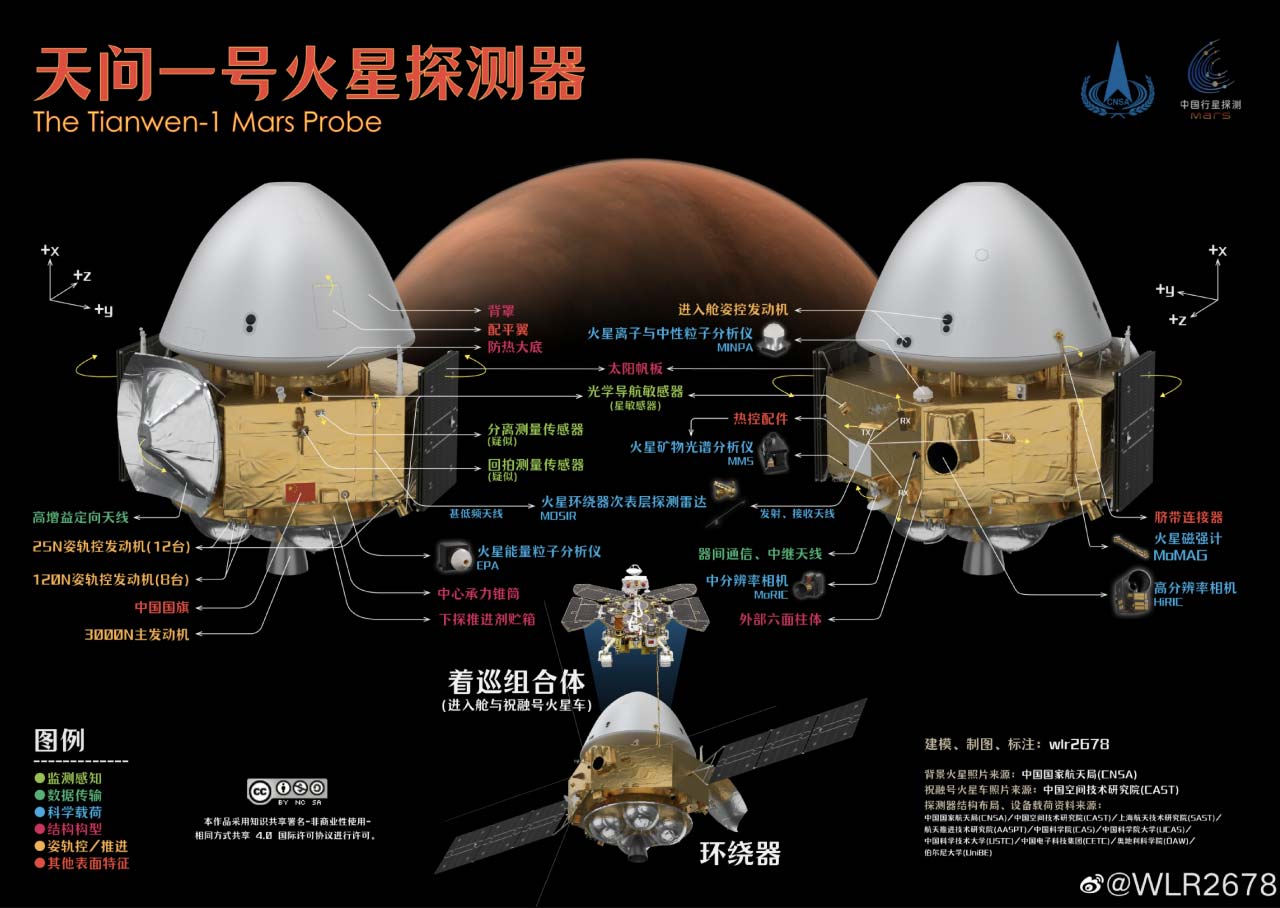
La misión Tianwen 1 está compuesta por tres elementos principales: el orbitador, el módulo de descenso y el rover Zhurong. En conjunto, forman un sistema integrado capaz de realizar observaciones globales y estudios locales en la superficie marciana. El conjunto tenía una masa total al lanzamiento de 4.920 kilogramos, de los cuales 3.175 correspondían al orbitador y 1.745 a la cápsula con el módulo de descenso y el rover.
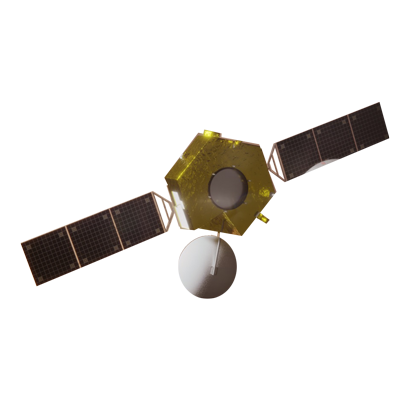
El orbitador, de estructura octogonal, incorpora paneles solares de gran envergadura y un motor principal de 3 kilonewton de empuje para las maniobras de inserción y control orbital. Sus funciones principales son la observación remota de Marte, el enlace de comunicaciones con el módulo de descenso y el almacenamiento y transmisión de los datos científicos hacia la Tierra. Dispone de sistemas redundantes de propulsión y control térmico, antenas de alta ganancia para comunicación en banda X y UHF, y equipos de telemetría y control adaptados al entorno interplanetario.
La cápsula de descenso, acoplada al orbitador durante el viaje interplanetario, incluye un escudo térmico, un paracaídas supersónico y un sistema de retropropulsión para la fase final del aterrizaje. Durante la entrada atmosférica, la cápsula utilizó un “flap” aerodinámico móvil y un sistema de navegación óptica para controlar la trayectoria y reducir la elipse de aterrizaje. Una vez frenada la velocidad, el módulo de descenso desplegó sus patas amortiguadas y descendió suavemente sobre la planicie de Utopia Planitia.
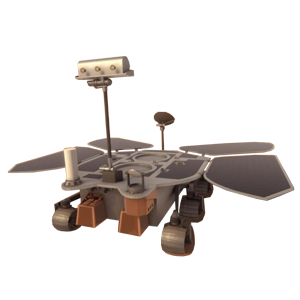
El rover Zhurong, con una masa de 240 kilogramos, es un vehículo de seis ruedas alimentado por energía solar, con estructura de aluminio y un mástil que alberga sus cámaras y sensores principales. Su diseño está basado en los rovers lunares Yutu y Yutu 2, pero adaptado a las condiciones de Marte mediante un sistema térmico autónomo y un conjunto de instrumentos dedicados al estudio del terreno y del entorno local. Dispone de antena de alta ganancia orientable, cámaras de navegación y paneles solares plegables que se abren tras el despliegue.
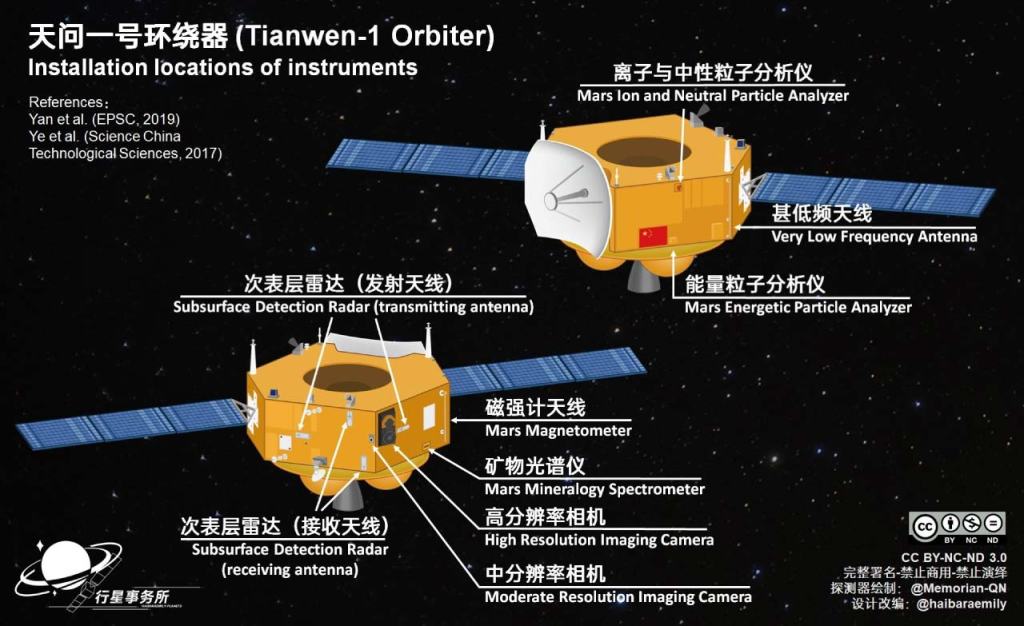
Instrumentación científica del orbitador
El orbitador transporta siete instrumentos científicos diseñados para el estudio de la superficie, la atmósfera y el entorno espacial de Marte. La cámara de alta resolución HiRIC (High Resolution Imaging Camera) puede obtener imágenes pancromáticas con una resolución de entre 2,5 y 0,5 metros por píxel y a color con resolución de 10 metros, permitiendo elaborar mapas topográficos de gran detalle. La cámara MoRIC (Moderate Resolution Imaging Camera) produce imágenes globales a 100 metros por píxel, útiles para cartografía general y estudios atmosféricos.
El radar MOSIR (Mars Orbiter Scientific Investigation Radar) permite sondear la subsuperficie hasta varios cientos de metros de profundidad, detectando capas de hielo o estructuras enterradas. Los instrumentos MINPA (Mars Ion and Neutral Particle Analyzer) y MEPA (Mars Energetic Particle Analyzer) analizan las partículas cargadas y neutras en la alta atmósfera y su interacción con el viento solar. El espectrómetro MMS (Mars Mineralogical Spectrometer) estudia la composición mineral de la superficie, y el magnetómetro MOMAG (Mars Orbiter Magnetometer), desarrollado en colaboración con la Academia de Ciencias de Austria, mide las variaciones del campo magnético marciano. Conjunto, estos instrumentos ofrecen una visión integral del entorno físico de Marte, desde la exosfera hasta el subsuelo.
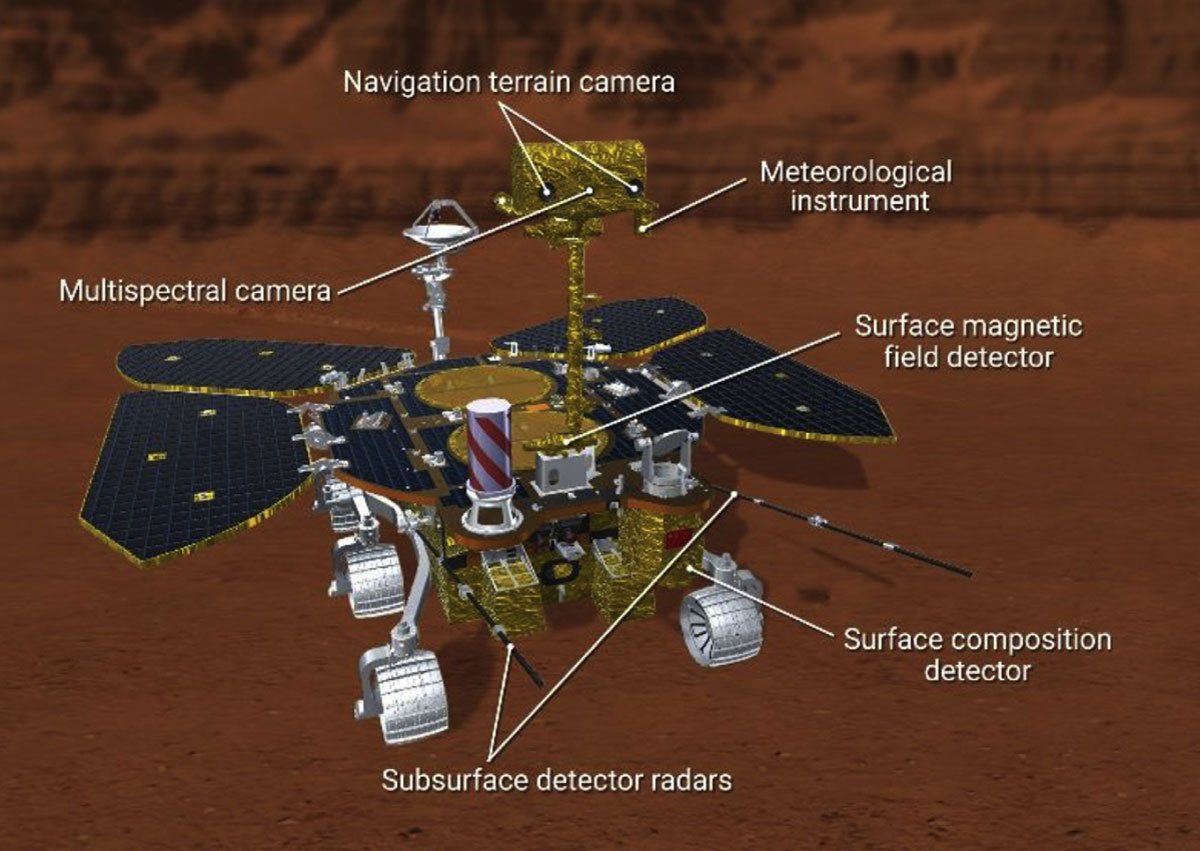
Instrumentación científica del rover Zhurong
El rover Zhurong cuenta con seis instrumentos científicos principales destinados al estudio geológico, físico y meteorológico del entorno marciano. Las cámaras NaTeCam (Navigation and Terrain Camera) proporcionan imágenes estereoscópicas para navegación y caracterización del terreno, mientras que la cámara multiespectral MSCam (Multispectral Camera) analiza la reflectancia de las rocas y su composición superficial mediante nueve filtros ópticos.
El radar de penetración RoPeR (Mars Rover Penetrating Radar) es capaz de explorar hasta 100 metros de profundidad, detectando posibles capas de hielo o estructuras sedimentarias. El espectrómetro MarSCoDe (Mars Surface Composition Detector) combina un espectrómetro láser, un espectrómetro infrarrojo y un microscopio para identificar la composición elemental y mineral de las rocas. Este instrumento, desarrollado con colaboración del Instituto de Investigación en Astrofísica y Planetología (IRAP, Francia), utiliza la técnica LIBS (“Laser-Induced Breakdown Spectroscopy”), similar a la empleada en los rovers estadounidenses Curiosity y Perseverance.
Completan el conjunto la estación meteorológica MCS (Mars Climate Station), que mide la temperatura, la presión y la velocidad del viento, y el magnetómetro RoMAG (Mars Rover Magnetometer), encargado de estudiar las variaciones locales del campo magnético. En conjunto, los instrumentos de Zhurong han permitido obtener datos sobre la composición del regolito, la presencia de minerales hidratados, la estructura del subsuelo y las condiciones meteorológicas de Utopia Planitia.
Utopia Planitia, el lugar del aterrizaje
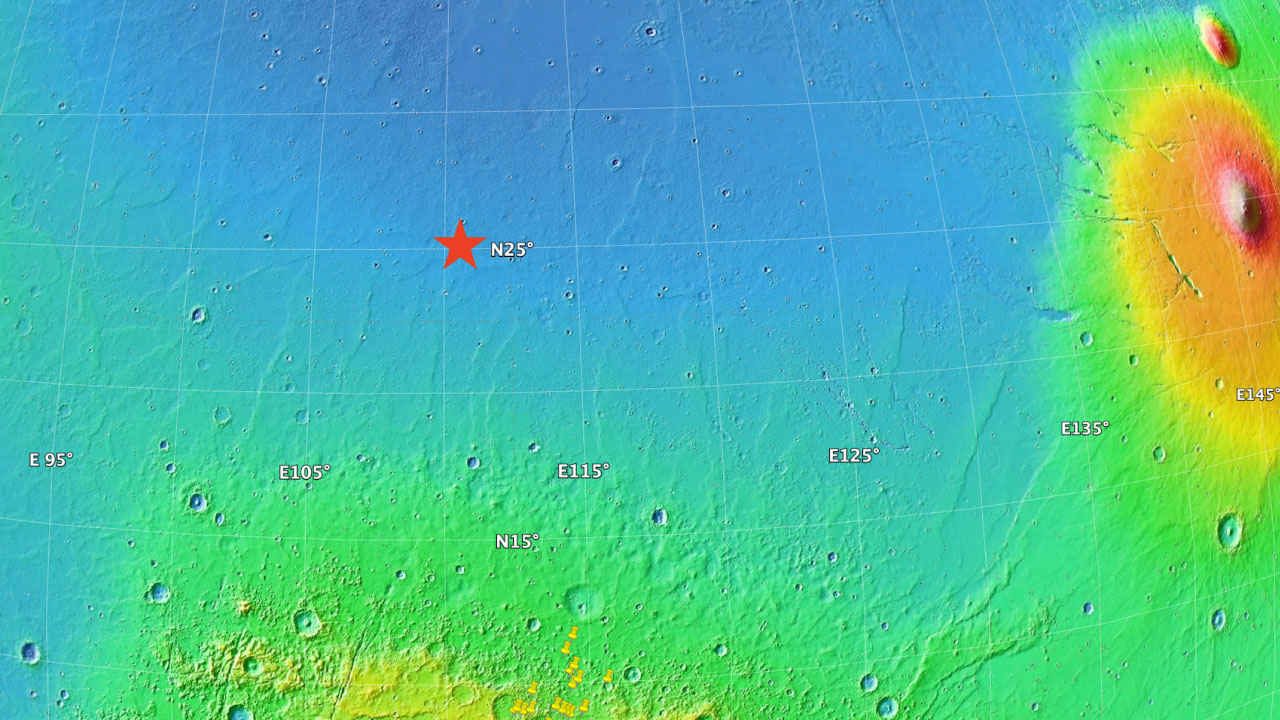
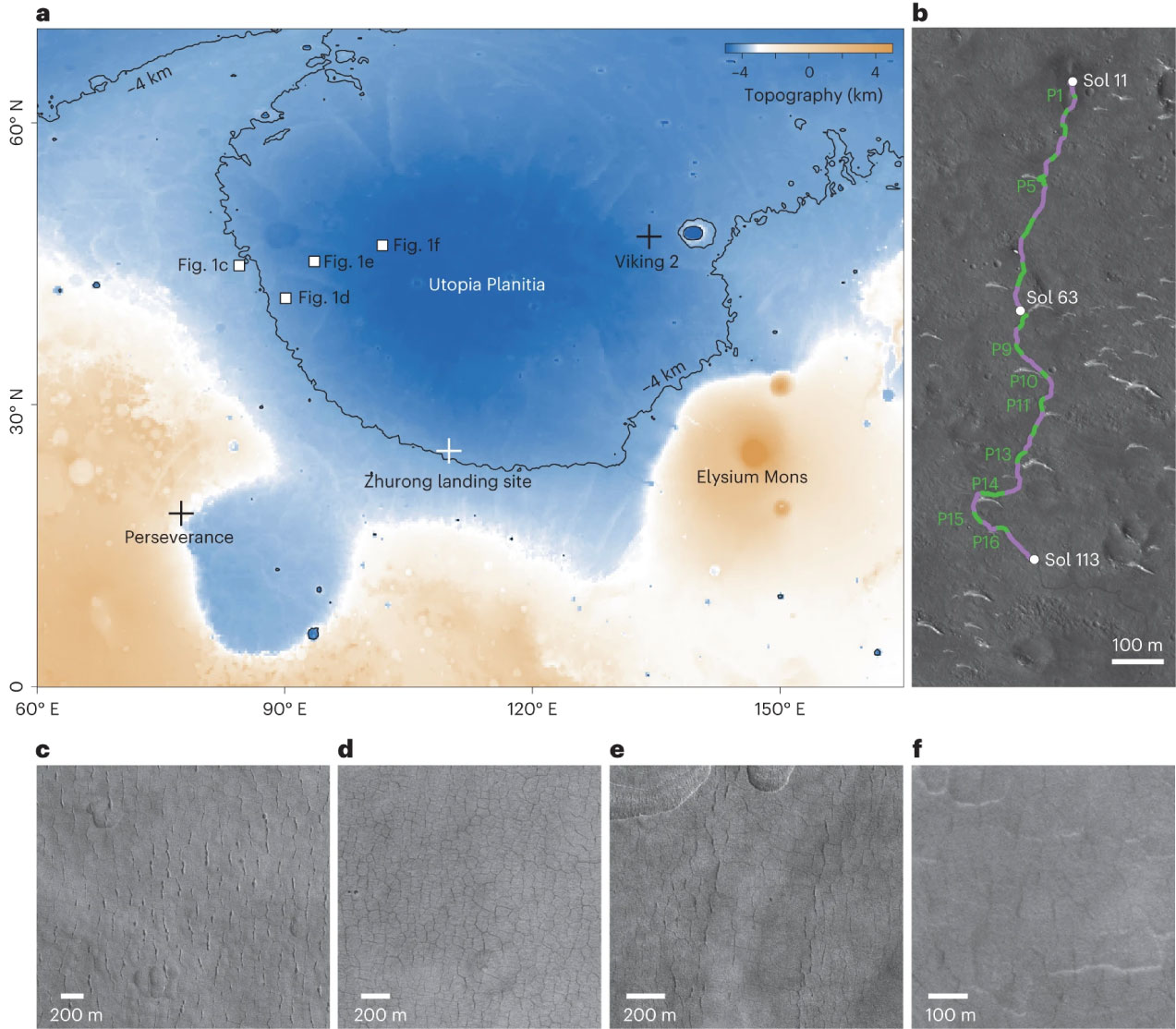
El lugar elegido para el aterrizaje de la misión Tianwen 1 fue la extensa planicie de Utopia Planitia, situada en el hemisferio norte de Marte. Esta región, de origen muy antiguo y cubierta por materiales volcánicos y sedimentarios, se extiende a lo largo de más de 3.000 kilómetros y forma parte de la amplia cuenca de impacto de Utopia, una de las mayores del planeta. Su relieve es relativamente llano y se encuentra a una altitud media de unos 4.000 metros por debajo del nivel de referencia marciano, lo que proporciona una atmósfera ligeramente más densa, una ventaja decisiva para reducir la velocidad durante el descenso.
Las observaciones previas realizadas por el orbitador Tianwen 1 permitieron identificar una zona segura dentro de la parte sur de la planicie, en las coordenadas 25,1° norte y 109,9° este. Este punto, cercano al límite entre las tierras altas del hemisferio sur y las llanuras del norte, combina interés geológico y condiciones adecuadas para un aterrizaje. La región muestra vestigios de procesos sedimentarios y criogénicos, con indicios de antiguos depósitos de hielo y estructuras modeladas por la acción del agua y del viento.
Además de su valor científico, Utopia Planitia tiene un simbolismo especial en la exploración de Marte. En 1976, la sonda estadounidense Viking 2 aterrizó en el sector septentrional de esta misma cuenca, convirtiéndose en la primera en operar con éxito en la región. Casi medio siglo después, Zhurong se convirtió en el primer rover no estadounidense en posarse y desplazarse sobre el mismo terreno, ampliando la exploración de un área clave para comprender la historia geológica y climática del planeta rojo.
Antecedentes de la misión Tianwen 1 en Marte
El desarrollo de Tianwen 1 fue el resultado de más de una década de avances en el programa espacial chino. Sus bases tecnológicas se consolidaron con el Programa de Exploración Lunar Chang’e, que desde 2007 había permitido a China ensayar con éxito todas las fases de una misión automatizada: inserción orbital, alunizaje, desplazamiento de rovers y retorno de muestras. La experiencia acumulada con las misiones Chang’e 3, 4 y 5 resultó esencial para diseñar los sistemas de guiado autónomo, control térmico y descenso propulsado que se aplicarían después en la misión marciana.
Antes de Tianwen 1, China había intentado acercarse a Marte con la pequeña sonda Yinghuo-1, lanzada en 2011 junto con la misión rusa Fobos-Grunt. Aquel proyecto, que debía estudiar la ionosfera y el entorno del viento solar alrededor del planeta, no logró abandonar la órbita terrestre tras el fallo del vehículo ruso y se perdió poco después. La cancelación de Yinghuo-1 retrasó casi una década los planes chinos de exploración marciana, pero sirvió para establecer un plan más ambicioso y autosuficiente.
A mediados de la década de 2010, la Agencia Nacional del Espacio de China (CNSA) inició el desarrollo del primer proyecto interplanetario completamente nacional. El objetivo era demostrar que el país podía alcanzar Marte, entrar en su órbita y operar un vehículo en superficie con sus propios medios, sin depender de cooperación tecnológica externa.
Su diseño y planificación coincidieron con el crecimiento de las capacidades de seguimiento en espacio profundo de China, incluida la construcción de una antena de 70 metros en Tianjin y la ampliación de su red de estaciones de comunicación en el hemisferio sur. Estas infraestructuras, junto con la experiencia del programa Chang’e, permitieron a la CNSA abordar con garantías la misión más compleja de su historia: llevar a cabo, al primer intento, una operación completa de exploración marciana.
Desarrollo de la misión Tianwen 1 en Marte
Lanzamiento de la misión Tianwen 1
La misión Tianwen 1 despegó el 23 de julio de 2020 a las 04:41 UTC desde el centro espacial de Wenchang, en la isla tropical de Hainán. Fue lanzada mediante un cohete Larga Marcha 5 (CZ-5), el vehículo más potente del programa espacial chino, capaz de situar más de 25 toneladas en órbita baja terrestre. Este lanzamiento representó la primera vez que el modelo CZ-5 se empleaba para una misión interplanetaria.
El conjunto de la misión, con una masa total de 4.920 kilogramos, fue insertado inicialmente en una órbita de aparcamiento terrestre antes de iniciar la maniobra de escape hacia Marte. El lanzamiento coincidió con la ventana de oportunidad de julio de 2020, durante la cual también despegaron las misiones Hope de Emiratos Árabes Unidos y Perseverance de la NASA. Desde el inicio, la trayectoria de Tianwen 1 fue cuidadosamente calculada para alcanzar Marte tras unos siete meses de vuelo interplanetario y permitir la inserción directa del orbitador en febrero de 2021.

Viaje interplanetario y las maniobras de corrección de trayectoria
Tras su lanzamiento, Tianwen 1 inició un viaje interplanetario de 202 días hacia Marte, siguiendo una trayectoria heliocéntrica de tipo Hohmann que permitió optimizar el consumo de combustible. La nave realizó cuatro maniobras de corrección de trayectoria (TCM) para ajustar su rumbo y velocidad antes de la llegada. La primera tuvo lugar el 1 de agosto de 2020 mediante un encendido de su motor principal de 3 kilonewton; la segunda, el 20 de septiembre, usó los propulsores auxiliares de 120 newton; la tercera se efectuó el 28 de octubre con los motores de 25 newton, y la cuarta y última, el 5 de febrero de 2021, corrigió la aproximación final al planeta.
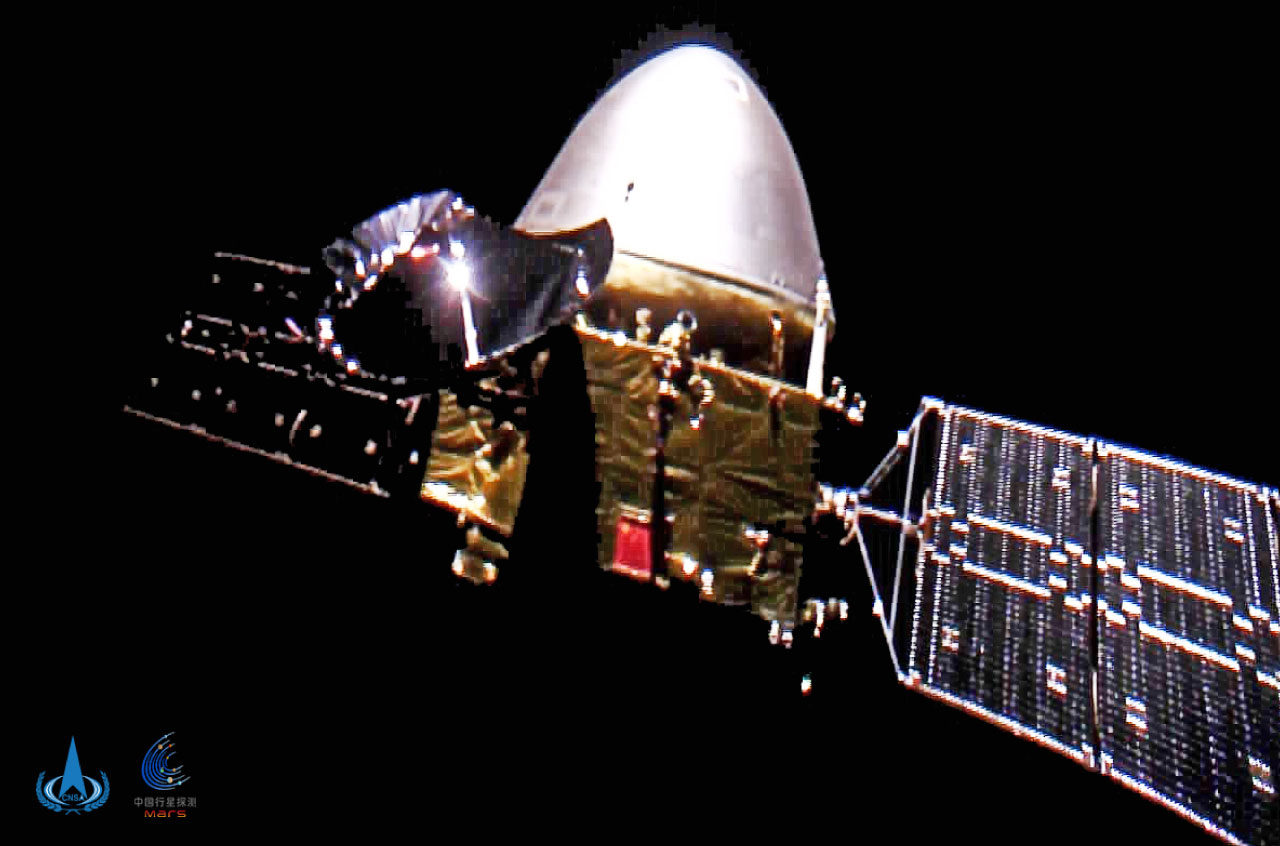
Durante la fase de crucero, la nave comprobó el funcionamiento de sus sistemas de comunicación, navegación y control térmico, además de realizar pruebas científicas con algunos instrumentos. Entre los hitos visuales de esta etapa destaca el “selfie” obtenido el 1 de octubre de 2020 por una pequeña cámara desplegable, que captó la sonda completa en el espacio profundo con la Tierra y la Luna al fondo, evidenciando la estabilidad del sistema y el correcto despliegue de los paneles solares.
Inserción orbital e inicio de la fase de reconocimiento
Tras la llegada a las inmediaciones de Marte, Tianwen 1 ejecutó la maniobra de inserción orbital el 10 de febrero de 2021. El encendido de su motor principal, con un empuje de 3 kilonewton, duró aproximadamente quince minutos y redujo la velocidad de la nave hasta permitir su captura gravitatoria por el planeta. La señal de éxito llegó al Centro de Control Aeroespacial de Pekín después de varios minutos de retraso, cuando la sonda reapareció por detrás del limbo marciano. Con esta maniobra, China se convirtió en el sexto país u organización en colocar una nave en órbita marciana.
La órbita inicial era muy elíptica, de unos 400 × 180.000 kilómetros y 11 días de periodo, desde la que se fueron realizando ajustes sucesivos hasta alcanzar una trayectoria de trabajo con un periastro de unos 280 kilómetros y una inclinación cercana a 87°. Esta configuración permitió al orbitador cubrir prácticamente toda la superficie del planeta y, en particular, realizar un reconocimiento detallado de Utopia Planitia, el área elegida para el aterrizaje del rover.
Durante esta fase, la nave activó por primera vez sus siete instrumentos científicos, entre ellos las cámaras HiRIC y MoRIC, que obtuvieron imágenes de alta resolución de la zona de descenso. Con una resolución de hasta 0,7 metros por píxel, las imágenes permitieron evaluar la pendiente, la densidad de rocas y otros parámetros esenciales para garantizar la seguridad del aterrizaje. En paralelo, los instrumentos de análisis de partículas y campo magnético iniciaron la recopilación de datos sobre la atmósfera superior y el entorno de plasma marciano.

Descenso y aterrizaje del módulo con el rover Zhurong
La fase de descenso comenzó el 14 de mayo de 2021, cuando la cápsula de entrada se separó del orbitador Tianwen 1 tras tres meses de reconocimiento orbital. La cápsula, con una masa de 1.745 kilogramos, inició su entrada atmosférica a una velocidad de unos 4,8 km/s sobre la región de Utopia Planitia. Durante esta fase, la nave combinó técnicas de guiado aerodinámico y navegación óptica, empleando un “flap” o superficie móvil para ajustar su trayectoria y aumentar la precisión del aterrizaje.
Tras el frenado inicial por rozamiento atmosférico, la cápsula desplegó un paracaídas supersónico cuando su velocidad se redujo a unos 1.660 km/h y se encontraba a unos 10 kilómetros de altitud. El escudo térmico frontal se desprendió y, poco después, se activó el radar de altitud y velocidad, que permitió calcular la distancia exacta al suelo. A 1,5 kilómetros de altura, la cápsula liberó el paracaídas y encendió el motor de empuje variable YF-36A, capaz de regular su potencia entre 1,5 y 7,5 kilonewton.
Durante los segundos finales del descenso, el módulo empleó cámaras de navegación y un sistema LIDAR para identificar obstáculos en el terreno. A 100 metros de altitud se detuvo brevemente en vuelo estacionario para seleccionar una zona segura, antes de completar el descenso final a unos 3 km/h. El contacto con el suelo se produjo a las 23:18 UTC del 14 de mayo de 2021, en las coordenadas 25,1° N y 109,9° E. Con ello, China se convirtió en el segundo país del mundo en lograr un aterrizaje operativo en Marte.
Despliegue y operaciones del rover Zhurong en la superficie marciana
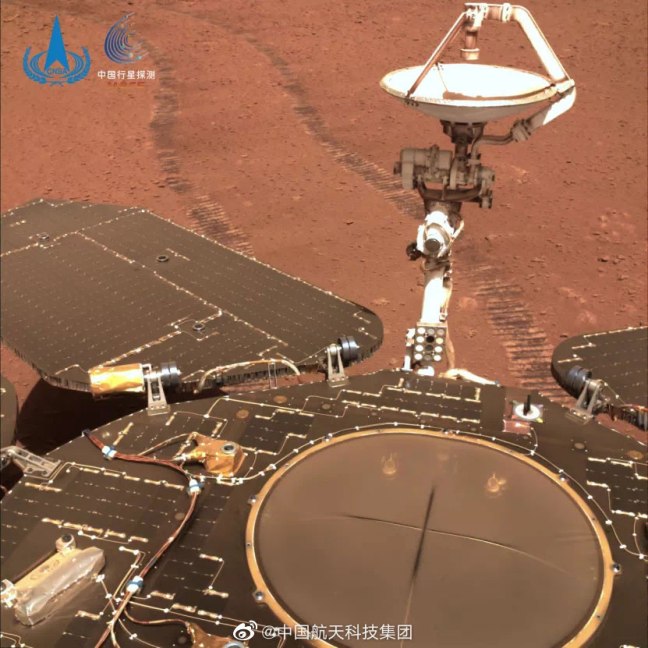
El 22 de mayo de 2021, ocho días después del aterrizaje, el rover Zhurong descendió por las rampas del módulo y sus seis ruedas tocaron por primera vez la superficie de Marte. Con una masa de 240 kilogramos y dimensiones de 2,0 × 1,65 × 0,8 metros, el vehículo comenzó su misión en la planicie de Utopia Planitia, una región caracterizada por dunas de arena fina y escasa presencia de rocas grandes.
Durante las primeras jornadas marcianas, el rover comprobó la calibración de sus cámaras, la orientación de su antena de alta ganancia y el correcto funcionamiento de los paneles solares. Posteriormente, inició sus desplazamientos en dirección sur, avanzando entre 5 y 10 metros por día marciano. Su velocidad aumentó gradualmente conforme el terreno se mostró estable, alcanzando recorridos de hasta 30 metros por sol durante el verano marciano.
El conjunto de instrumentos de Zhurong permitió realizar observaciones simultáneas del terreno y de la atmósfera. Las cámaras multiespectrales y de navegación obtuvieron panoramas de alta resolución y mosaicos estereoscópicos, mientras el radar RoPeR detectaba estructuras subterráneas hasta profundidades cercanas a los 80 metros. El espectrómetro MarSCoDe analizó la composición de rocas y regolito mediante pulsos láser, revelando la presencia de minerales con compuestos hidratados, indicios de una antigua actividad acuosa.
El 1 de junio de 2021, el rover liberó una pequeña cámara inalámbrica que captó imágenes del vehículo junto a la plataforma de descenso, una de las secuencias más emblemáticas de la misión. En las semanas siguientes, Zhurong continuó desplazándose entre pequeñas ondulaciones y dunas, realizando mediciones meteorológicas y magnéticas diarias. La sonda envió a la Tierra más de 10 gigabytes de datos científicos antes de entrar en hibernación estacional a mediados de 2022.
Fase extendida y estado actual del orbitador y del rover
Tras completar los 92 días marcianos previstos para su misión principal, el rover Zhurong continuó operando con normalidad durante casi un año. Durante ese tiempo recorrió más de 1,9 kilómetros sobre la superficie de Utopia Planitia, transmitiendo datos geológicos, magnéticos y meteorológicos que ampliaron el conocimiento de las regiones de latitudes medias. Las imágenes tomadas por las cámaras NaTeCam y MSCam documentaron un terreno modelado por la acción del viento y la acumulación de polvo, mientras que el radar RoPeR y el espectrómetro MarSCoDe aportaron información sobre la estructura y composición del subsuelo.
A mediados de 2022, con la llegada del invierno local, las temperaturas descendieron por debajo de −100 °C y la insolación disminuyó, reduciendo la capacidad de generación eléctrica de los paneles solares. Ante estas condiciones, el equipo de control de la CNSA ordenó que el rover entrara en hibernación el 18 de mayo de 2022. Este modo debía prolongarse hasta el inicio de la primavera marciana, pero las comunicaciones no se restablecieron al finalizar el periodo. Las imágenes orbitales obtenidas posteriormente por Tianwen 1 mostraron al Zhurong inmóvil en su última posición, cubierto por polvo, lo que sugiere una pérdida irreversible de energía y dio por finalizada su misión.

El orbitador Tianwen 1 ha seguido operativo en órbita marciana. Tras completar su fase de soporte a las operaciones del rover, continuó realizando observaciones científicas con sus siete instrumentos y sirviendo como plataforma de retransmisión de datos. Desde 2022 ha obtenido imágenes de alta resolución de amplias regiones del hemisferio norte, ha medido la estructura del campo magnético marciano y ha estudiado las propiedades de la atmósfera superior. A partir de los datos combinados de sus instrumentos se elaboró también un modelo independiente del campo gravitatorio de Marte, el primero desarrollado fuera del entorno NASA–ESA, que permitió refinar la distribución de masas en grandes cuencas de impacto como Utopia y Hellas.
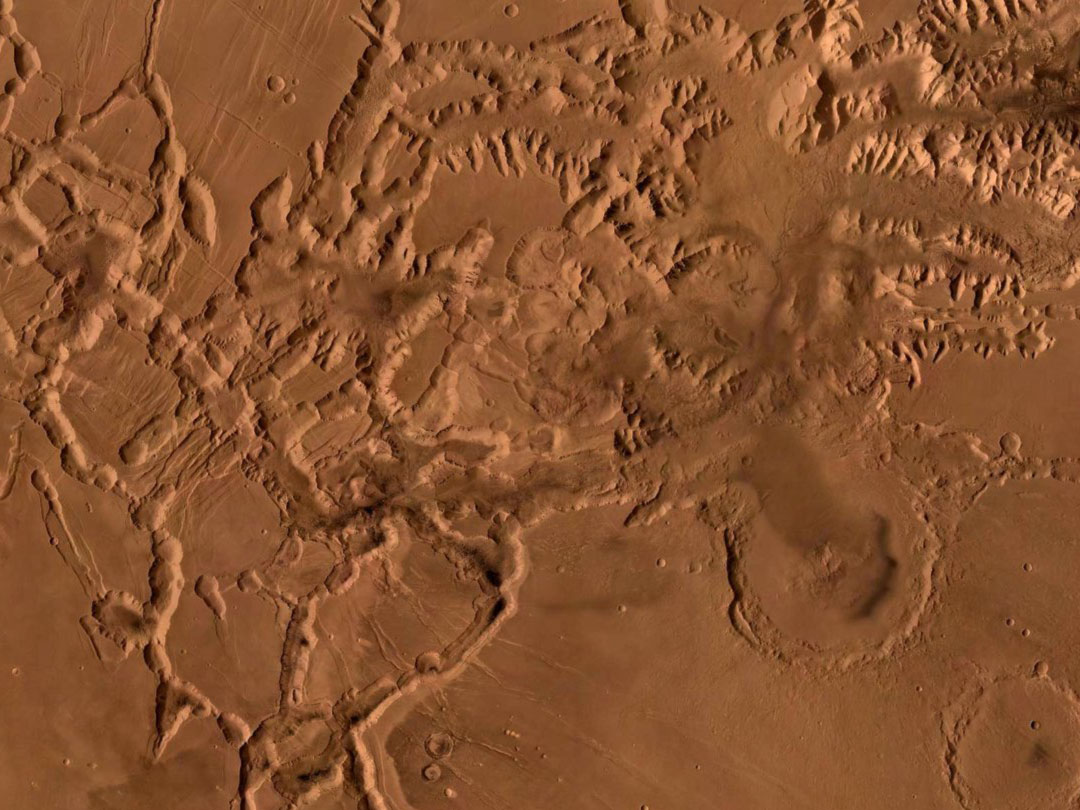
Mosaico de Noctis Labyrinthus al este de Valles Marineris captado por la sonda Tianwen 1. Créditos: CNSA 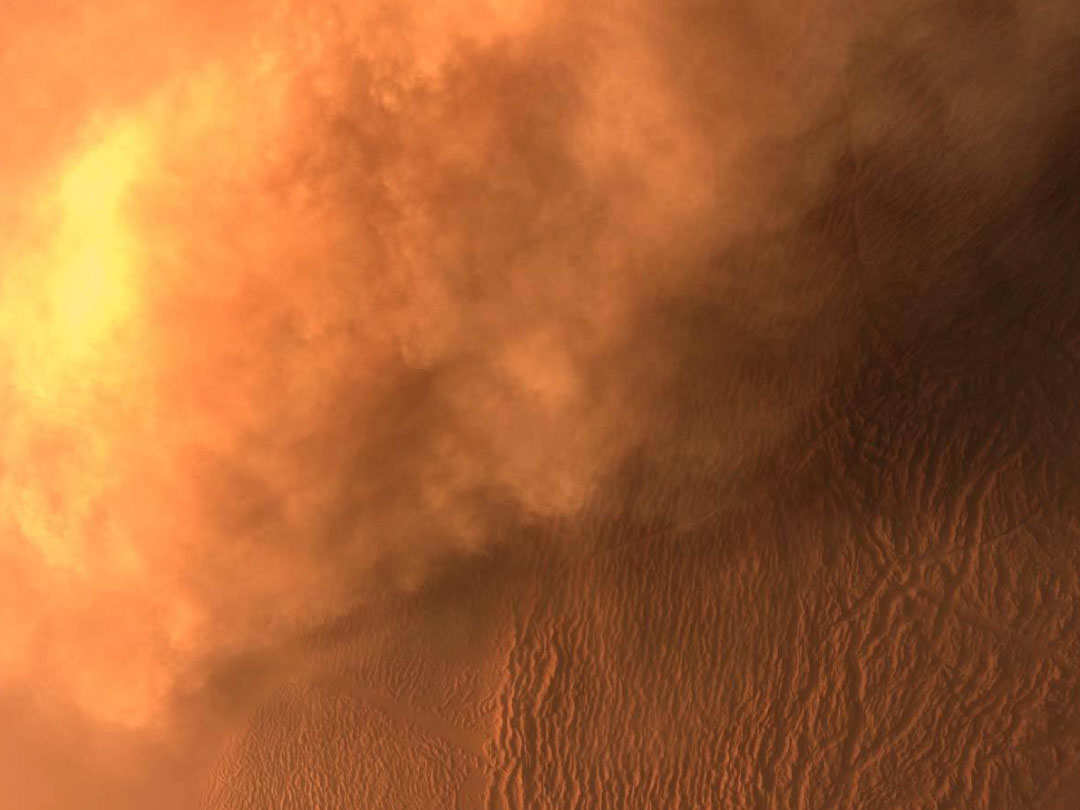
Imagen tomada por Tianwen 1 mostrando una tormenta de polvo en el hemisferio norte marciano. Créditos: CNSA 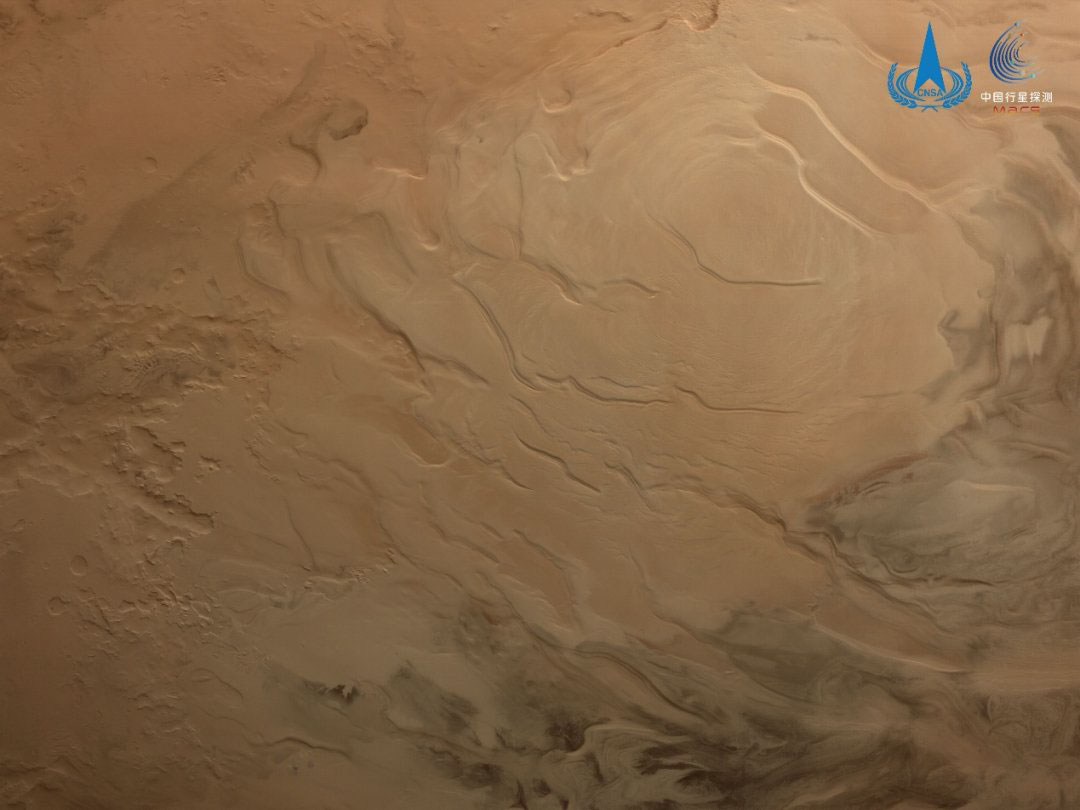
El orbitador Tianwen 1 registró esta vista del casquete polar sur de Marte. Créditos: CNSA 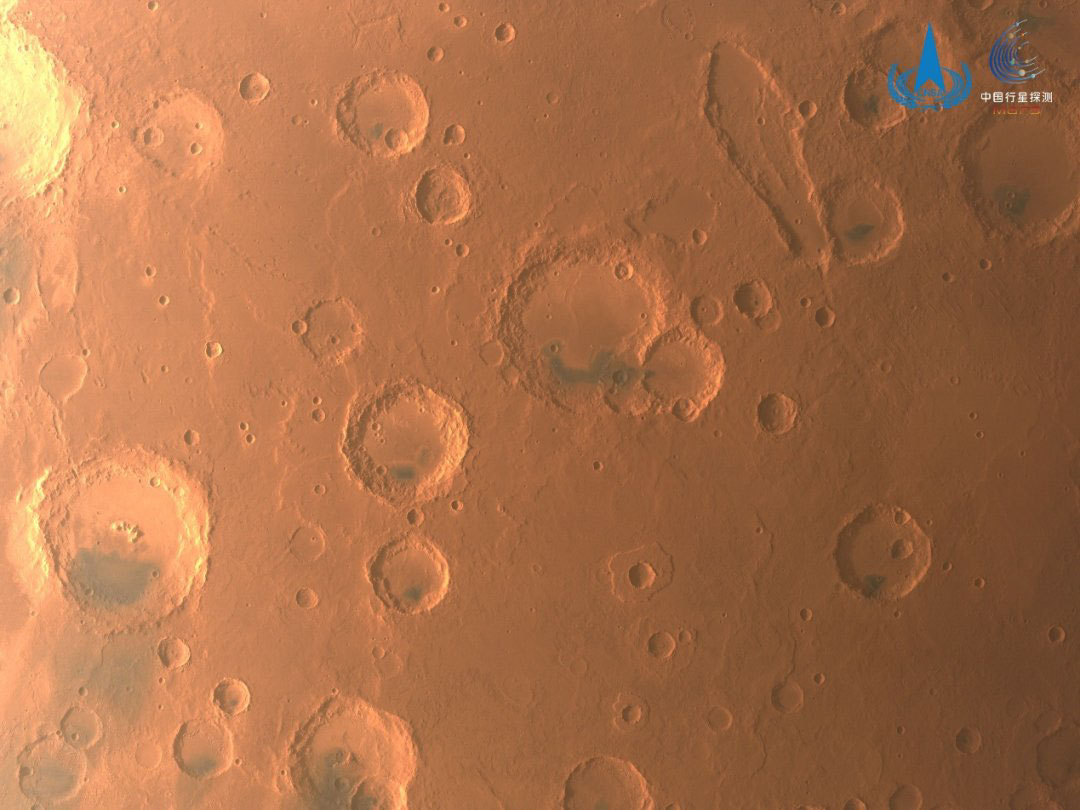
La cámara de alta resolución del orbitador Tianwen 1 obtuvo esta imagen de la región de Arabia Terra. Créditos: CNSA 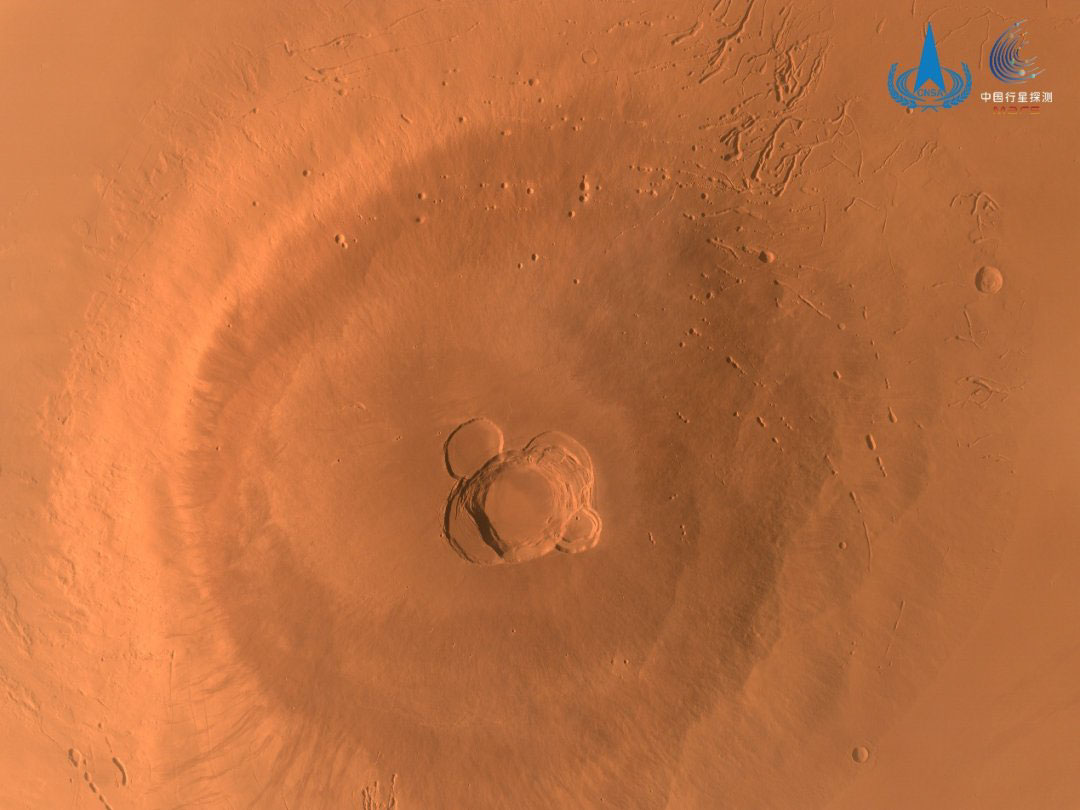
El volcán Olympus Mons, el mayor del Sistema Solar, fotografiado por el orbitador Tianwen 1. Créditos: CNSA
En 2023 la misión entró oficialmente en su fase extendida, centrada en la obtención de series temporales y en el apoyo a futuras misiones del programa Tianwen, incluida la prevista para el retorno de muestras marcianas a finales de la década.
Durante ese mismo periodo, las observaciones ópticas y polarimétricas del rover permitieron caracterizar las propiedades del regolito en Utopia Planitia. Los datos mostraron partículas finas de composición basáltica con un comportamiento óptico compatible con materiales alterados por la presencia de agua helada o vapor en etapas pasadas.
En 2024, un estudio internacional basado en los datos del radar de penetración RoPeR permitió identificar bajo Utopia Planitia un terreno poligonal enterrado, situado a unos 35 metros de profundidad. El radar detectó dieciséis estructuras alineadas a lo largo de un recorrido de 1,2 kilómetros, interpretadas como cuñas de antiguos polígonos de contracción térmica. Estas formaciones, similares a las observadas en regiones periglaciares de la Tierra, se habrían originado durante ciclos de congelación y deshielo en un periodo de fuerte variabilidad climática entre el final del Hespérico y el inicio del Amazónico. La existencia de este terreno poligonal fosilizado sugiere que, en latitudes medias como las de Utopia Planitia, el hielo subsuperficial y la actividad hídrica fueron más estables y extensos de lo que se suponía, aportando nuevas pruebas de la evolución climática de Marte.
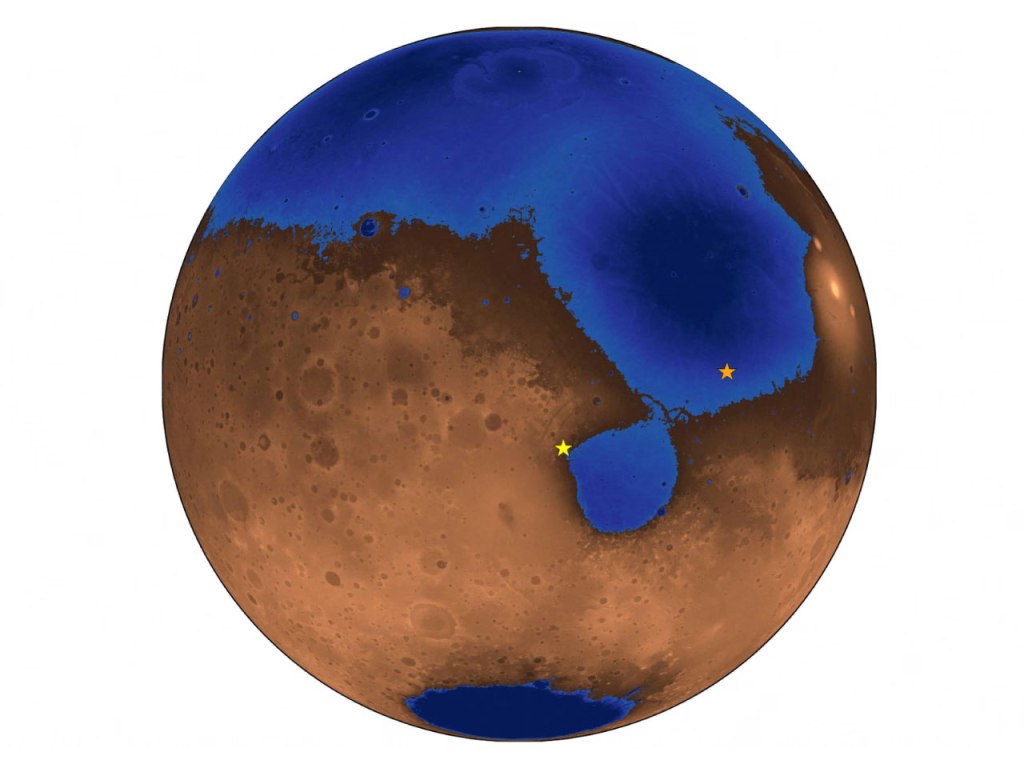
En 2025, nuevos análisis del radar del Zhurong revelaron otra estructura bajo el subsuelo de Utopia Planitia: capas sedimentarias inclinadas hacia el norte interpretadas como restos de antiguas playas enterradas. Estas formaciones indicarían la presencia de un océano en el hemisferio norte marciano durante el periodo Hespérico tardío. El patrón de inclinación de los sedimentos sugiere procesos de oleaje, mareas y aportes fluviales, señalando que el nivel del agua se desplazó progresivamente hacia el norte mientras el litoral avanzaba hasta más de un kilómetro. La identificación de estas paleoplayas constituye la evidencia más directa hasta la fecha de la existencia de un océano marciano y refuerza la hipótesis de que las regiones bajas de Marte, como Utopia Planitia, fueron entornos donde coexistieron agua líquida, hielo y sedimentos durante largos intervalos de tiempo.
En noviembre de 2025, el orbitador Tianwen 1 capturó con su cámara de alta resolución HiRIC al cometa interestelar 3I/Atlas tras pasar por el perihelio, a una distancia de 30 millones de km. Este cuerpo, el tercero de origen interestelar detectado en el Sistema Solar tras 1I/ʻOumuamua y 2I/Borisov, fue registrado desde la órbita marciana, lo que permitió obtener imágenes y datos espectrales del núcleo y de la coma. El análisis preliminar indicaría diferencias en la composición y en la dinámica del material eyectado respecto a los cometas de origen solar.
Cronología de la misión Tianwen 1
| Lanzamiento | 23 de julio de 2020 |
| Inserción en órbita | 10 febrero 2021 |
| Separación del módulo de descenso y aterrizaje | 14 mayo 2021 |
| Entrada en hibernación del rover Zhurong | 18 mayo 2022 |
| Continuación de las observaciones científicas del orbitador | 2022 – Actualidad |
Galería de imágenes de la misión Tianwen 1
Imagen del objeto interestelar 3I/ATLAS capturado desde una distancia de 30 millones de km.
Créditos: CNSA
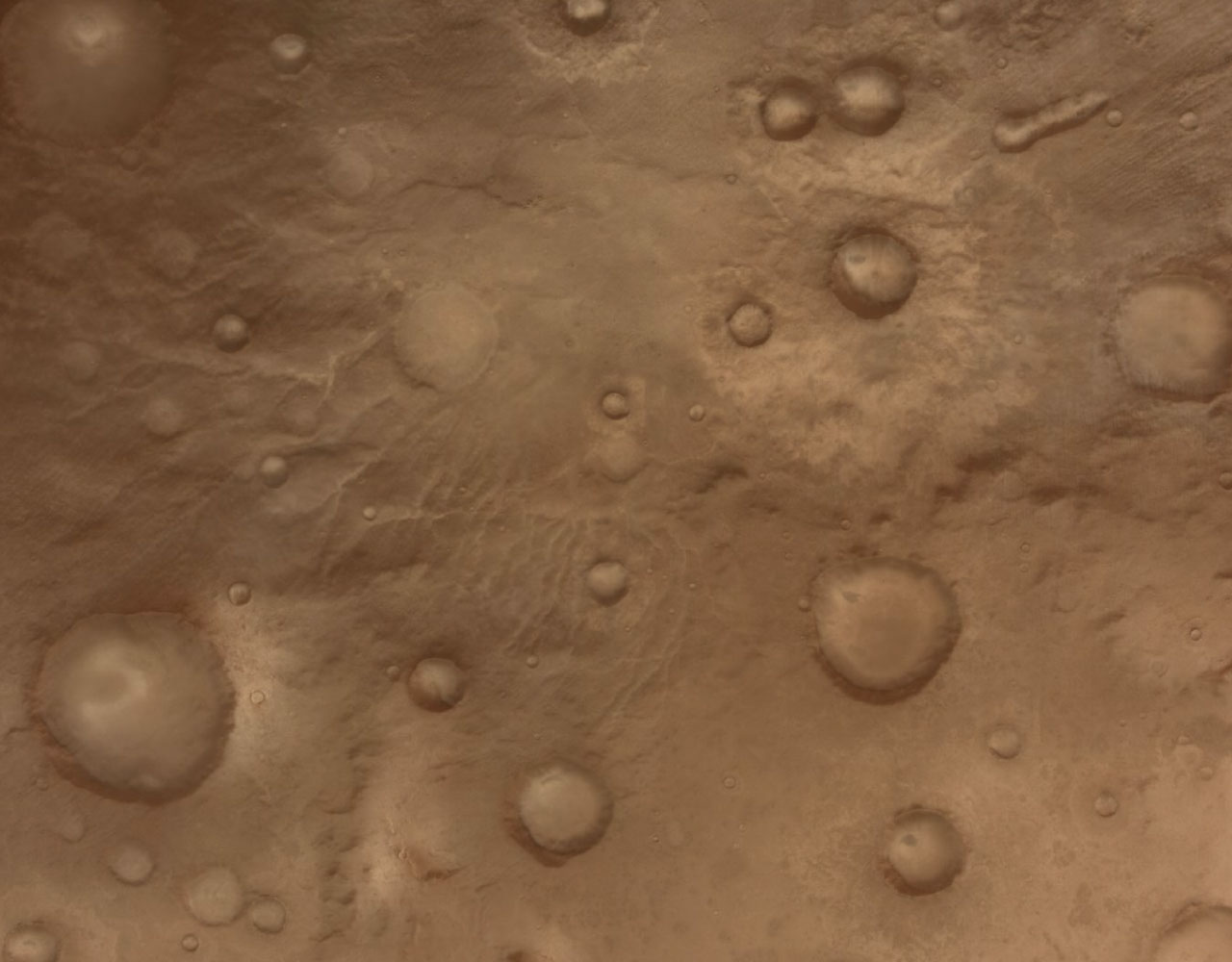
La cámara MoRIC de resolución media de la misión Tianwen 1 captó esta vista de la región de Utopia Planitia, una extensa llanura del hemisferio norte marcada por cráteres, antiguos flujos volcánicos y depósitos de polvo.
Créditos: CNSA
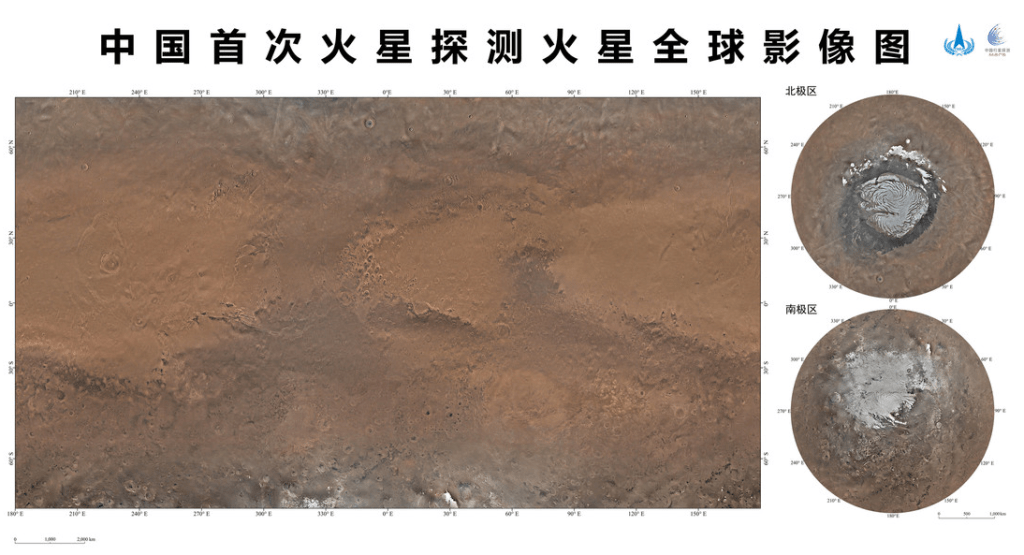
Proyección Mercator de Marte y los casquetes polares a partir de los datos de la misión Tianwen 1.
Créditos: CNSA
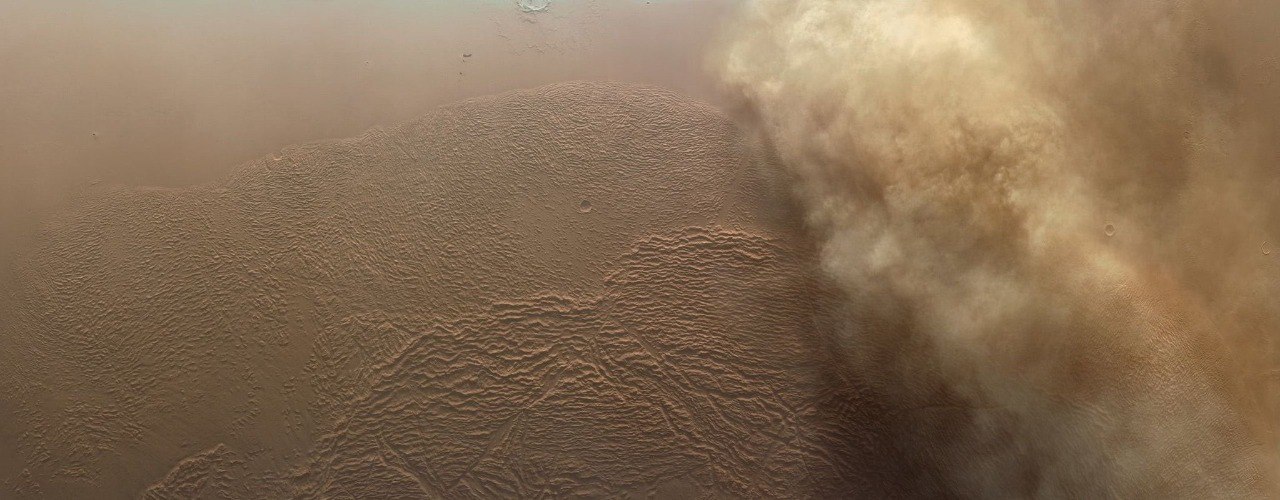
Tormenta de polvo captada por el orbitador chino Tianwen-1.
Créditos: CNSA

Nubes marcianas captadas por la sonda china Tianwen-1 en abril de 2022 a 678 km de distancia.
Créditos: CNSA/CLEP/PEC/MoRIC/Andrea Luck
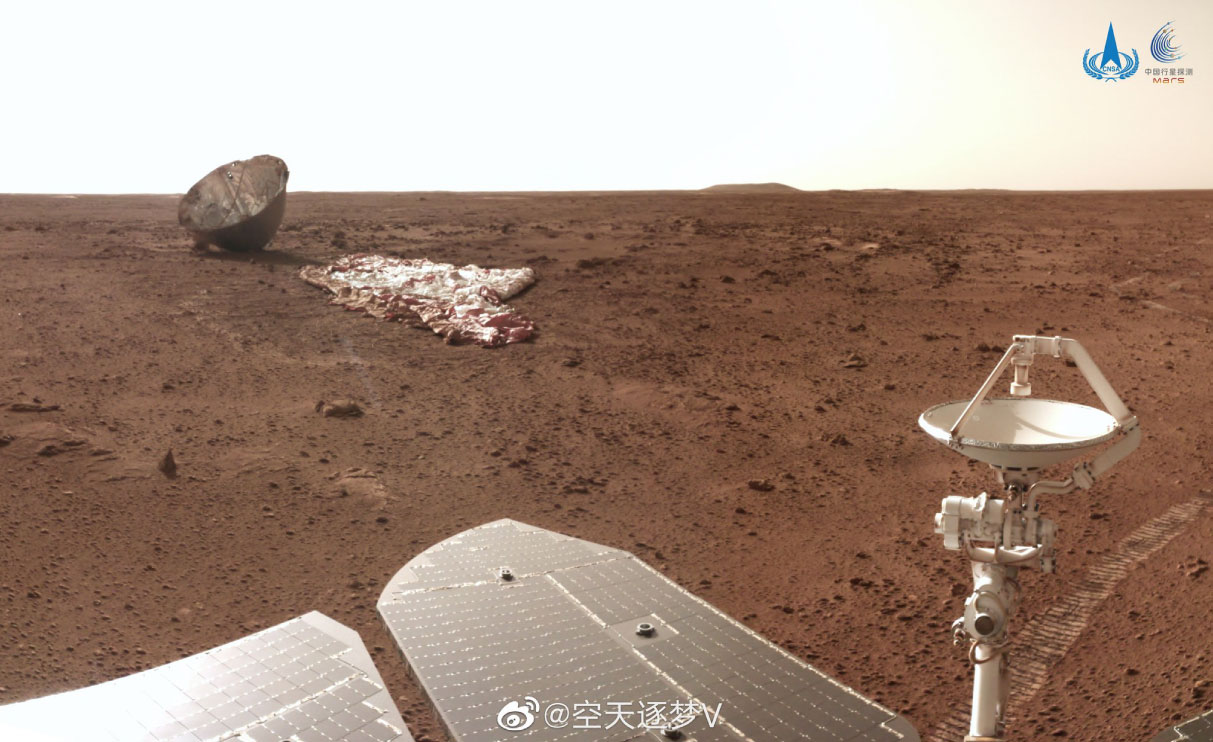
Imagen tomada por el rover Zhurong mostrando el escudo posterior y el paracaídas de la misión Tianwen 1 sobre el terreno marciano.
Créditos: CNSA
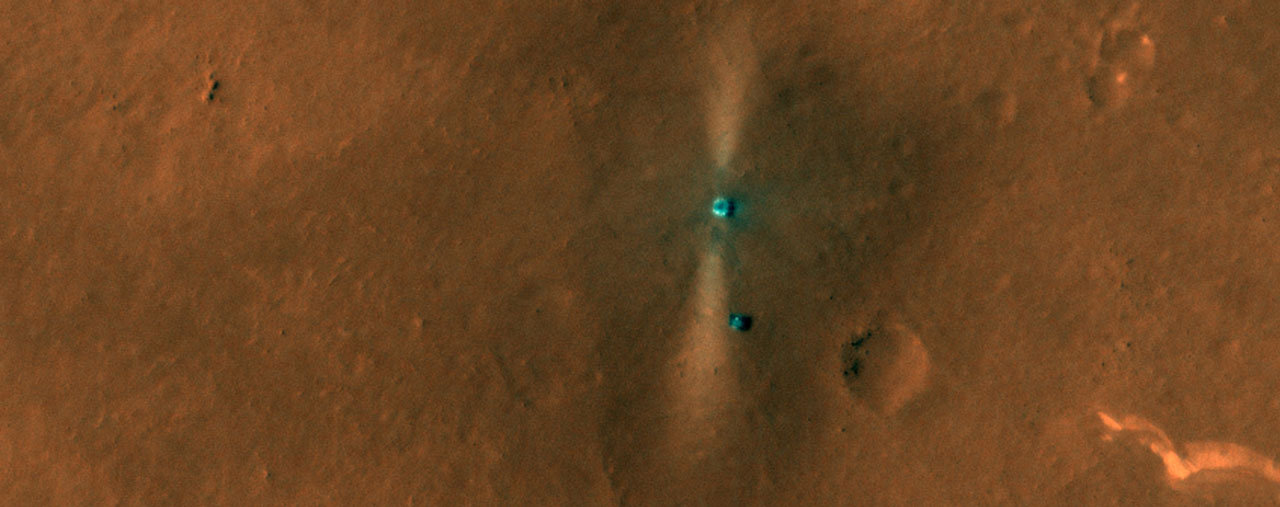
La cámara HiRISE del Mars Reconnaissance Orbiter captó el 6 de junio de 2021 al módulo de aterrizaje chino Tianwen-1 y al rover Zhurong en Utopia Planitia.
Créditos: NASA/JPL-Caltech/University of Arizona
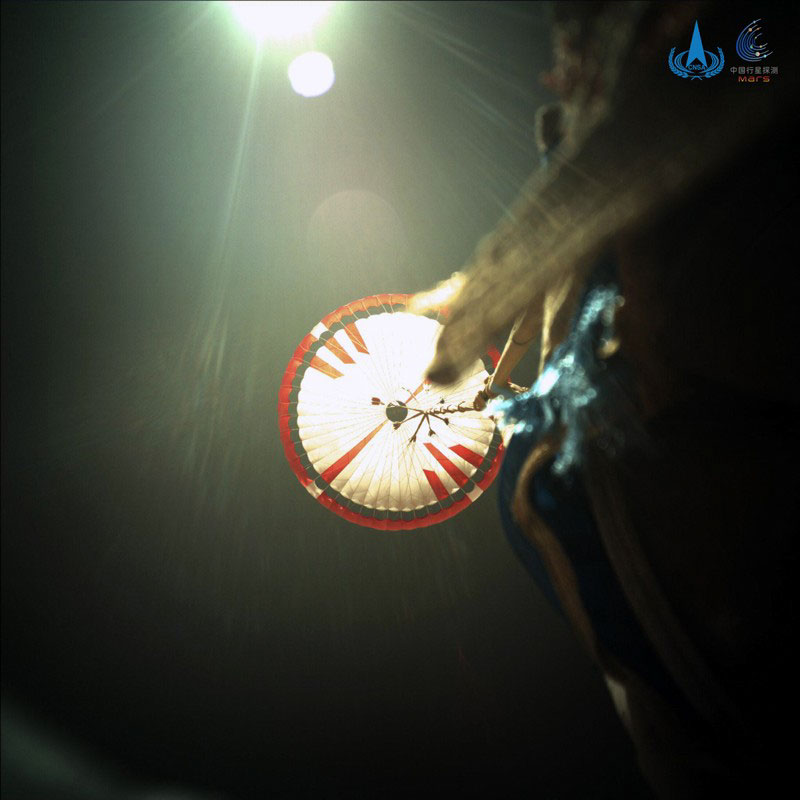
Imagen tomada por una cámara a bordo del módulo de descenso de Tianwen 1 mostrando el paracaídas desplegado durante la fase de entrada atmosférica el 14 de mayo de 2021.
Créditos: CNSA
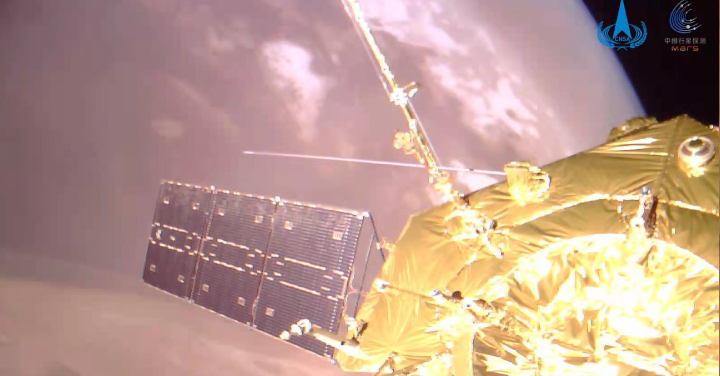
El orbitador Tianwen orbitando sobre Marte.
Créditos: CNSA
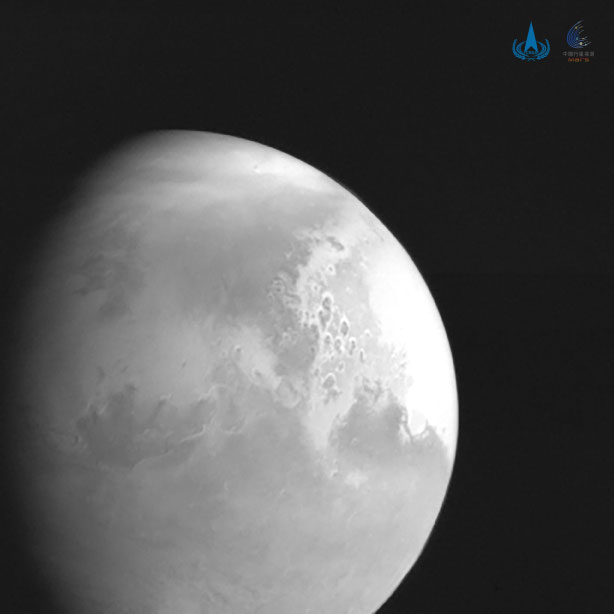
Imagen en blanco y negro obtenida el 5 de febrero de 2021 por la cámara de monitoreo de Tianwen 1, cuando la nave se encontraba a 2,2 millones de kilómetros de Marte.
Créditos: CNSA
Referencias y más información:
- Chi, P. J. et al. (2023). Initial results from the Tianwen-1 mission to Mars. The Astrophysical Journal Supplement Series, 267(3).
- Yang, J. et al. (2024). Optical and polarimetric properties of Martian regolith observed by the Zhurong rover in Utopia Planitia. Journal of Physics: Conference Series, 2887(1), 012064.
- Zhang, L. et al. (2024). Buried palaeo-polygonal terrain detected underneath Utopia Planitia on Mars by the Zhurong radar. Nature Astronomy, 8, 69–76.
- National Astronomical Observatories of China (NAOC)
Misiones espaciales a Marte en No Sólo Sputnik!:
























Explora el planeta Marte

Conoce las características de Marte, cuarto planeta del sistema solar y segundo más pequeño, principal destino de las misiones científicas

La superficie de Marte, un árido y seco mundo con gigantes volcanes, grandes cañones y vastas llanuras, futura casa para la humanidad

Amplía información sobre la atmósfera de Marte, su dinámica, vientos y tormentas de polvo que en ocasiones cubren todo el planeta

Conoce las dificultades para llegar y la exploración de Marte, objetivo prioritario para las principales agencias espaciales

Cronología de la exploración de Marte, desde los primeros intentos soviéticos por llegar al planeta rojo hasta el rover Perseverance de la NASA o la misión Tianwen 1 china, últimas en llegar a Marte

La enorme velocidad de las naves y la ligera atmósfera marciana provocan una gran tasa de fracasos en los amartizajes en Marte. Conoce cuántas misiones lo han logrado
Conoce los pequeños satélites de Marte, Fobos y Deimos, y cómo su enigmático origen guarda el secreto del pasado del planeta rojo.


