Desde 2012 explorando el cráter Gale para reconstruir la historia de Marte y sus antiguos ambientes habitables
Misión en curso
Objetivos:
Superficie de Marte
Nave espacial:
Mars Science Laboratory
Fecha de lanzamiento:
26 de noviembre de 2011
Lanzador:
Atlas V 541
Lugar de lanzamiento:
Cabo Cañaveral, SLC 41
Control de misión:
NASA/JPL-Caltech
El rover Curiosity forma parte del programa Mars Science Laboratory (MSL) de la NASA y fue diseñado para estudiar si Marte pudo haber albergado en el pasado condiciones favorables para la vida microbiana. Lanzado en 2011, aterrizó en el cráter Gale en agosto de 2012, marcando un avance decisivo en la exploración marciana al combinar movilidad, capacidad analítica y autonomía operativa en un mismo sistema.
El cráter Gale fue elegido por su gran interés geológico: una cuenca con depósitos sedimentarios que conservan el registro de antiguos lagos y ríos. El estudio de sus estratos permite reconstruir la evolución ambiental del planeta y comprender cómo Marte pasó de ser un mundo más húmedo a uno árido y frío.
Desde su llegada, Curiosity ha aportado pruebas de la existencia pasada de agua líquida y de entornos con condiciones químicas favorables para la vida. A más de una década de su aterrizaje, el rover continúa activo, ascendiendo por las laderas del monte Sharp y proporcionando nuevos datos sobre la historia geológica y climática de Marte.




Noticias anteriores de la misión Perseverance:



Objetivos de la misión Curiosity en Marte
La misión del rover Curiosity tiene como propósito principal evaluar la habitabilidad pasada de Marte, es decir, determinar si en algún momento existieron las condiciones necesarias para sustentar vida microbiana. Para ello, el rover estudia la composición del terreno, las rocas y la atmósfera, buscando evidencias de agua líquida, fuentes de energía química y compuestos orgánicos que pudieran haber favorecido procesos biológicos.
Otro de sus objetivos es reconstruir la historia geológica y ambiental del cráter Gale, su lugar de aterrizaje. Esta región conserva un registro sedimentario excepcional que permite analizar cómo variaron los ambientes marcianos a lo largo del tiempo, desde antiguos lagos y deltas hasta los periodos de desecación y erosión. El estudio de estas capas aporta información sobre la evolución del clima y sobre la pérdida progresiva de agua en la superficie marciana.
La misión también busca comprender las interacciones entre la superficie y la atmósfera marciana, así como los procesos que modifican los minerales y el regolito. Estas observaciones contribuyen a establecer un marco comparativo con la Tierra y con otros cuerpos del Sistema Solar.
Curiosity continúa operativo y cumpliendo sus objetivos científicos, ampliando nuestro conocimiento sobre la capacidad de Marte para haber albergado vida en el pasado y sobre los factores que determinaron su transformación en un planeta árido e inhóspito. ⬆
Características e instrumentación del rover Curiosity
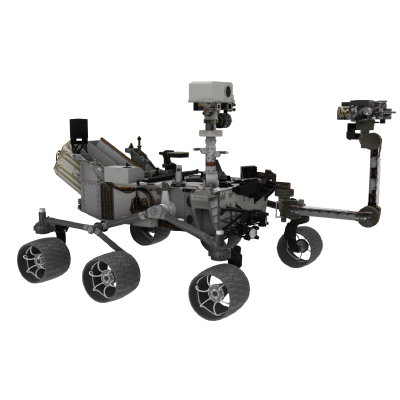
Curiosity es un rover de seis ruedas diseñado por el Jet Propulsion Laboratory (JPL) de la NASA dentro del programa Mars Science Laboratory (MSL). Con una masa aproximada de 899 kg y unas dimensiones de 2,9 m de largo, 2,7 m de ancho y 2,2 m de alto, fue el vehículo más grande y pesado jamás enviado a Marte en el momento de su lanzamiento. Su arquitectura sirvió de base para el posterior desarrollo del rover Perseverance, manteniendo el mismo sistema de movilidad y alimentación mediante un generador termoeléctrico de radioisótopos (MMRTG), que convierte el calor del plutonio-238 en electricidad. Este generador produce de forma continua unos 110 W, lo que garantiza autonomía a largo plazo sin depender de la luz solar.
El sistema de locomoción se compone de seis ruedas de aluminio con un diámetro de 50 cm, conectadas a un sistema de suspensión tipo “rocker-bogie” que permite mantener la estabilidad incluso en pendientes o terrenos irregulares. Cada rueda incorpora su propio motor eléctrico, y las delanteras y traseras pueden girar de forma independiente, proporcionando una notable maniobrabilidad. El rover es capaz de superar obstáculos de hasta 65 cm de altura y desplazarse a una velocidad media de unos 45 m por hora en superficie plana.
Instrumentación científica del rover Curiosity
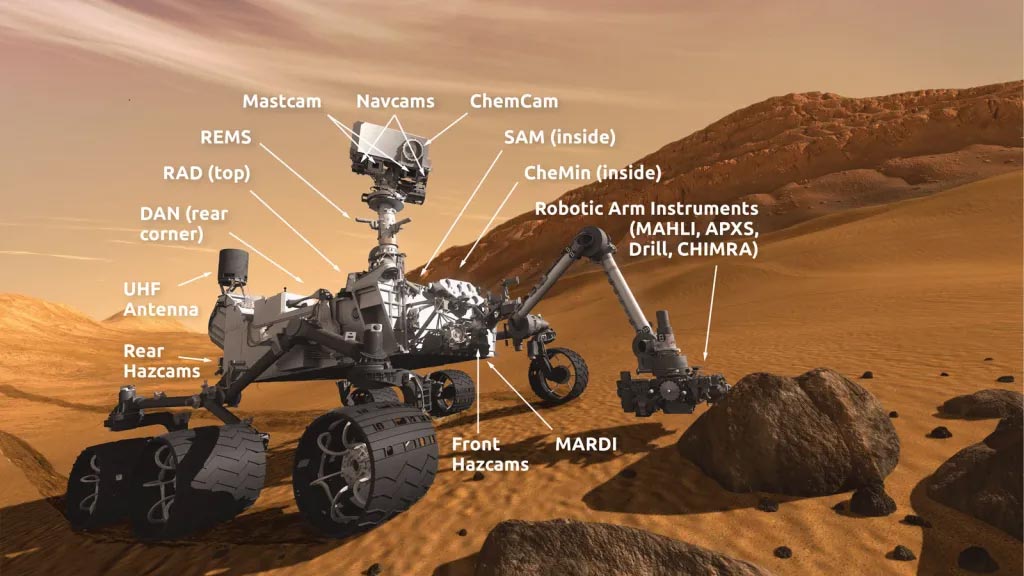
El conjunto de instrumentos del rover Curiosity fue diseñado para realizar un estudio exhaustivo del entorno marciano y evaluar su potencial para haber albergado vida microbiana en el pasado. La carga científica combina sistemas de observación remota, análisis de contacto y laboratorios internos capaces de procesar muestras sólidas y gaseosas. En total, el “payload” principal está compuesto por diez instrumentos integrados en distintas partes del vehículo.
En el mástil se encuentran los sistemas de observación y caracterización a distancia. El conjunto Mastcam está formado por dos cámaras capaces de obtener imágenes panorámicas, estereoscópicas y en color, que permiten estudiar la geología del terreno y seleccionar objetivos de análisis. Junto a ellas, el instrumento ChemCam emplea un láser para vaporizar pequeñas cantidades de material en la superficie de las rocas y analizar la luz emitida mediante espectroscopía, lo que permite identificar su composición elemental sin necesidad de contacto físico.
En el extremo del brazo robótico se sitúan los instrumentos destinados al análisis directo. El APXS (Alpha Particle X-ray Spectrometer) mide la composición química de las rocas y del suelo mediante radiación alfa y rayos X, mientras que MAHLI (Mars Hand Lens Imager) es una cámara de enfoque variable capaz de obtener imágenes microscópicas de alta resolución, comparables a las observadas con una lupa geológica en la Tierra. Estas herramientas permiten seleccionar con precisión las muestras que serán posteriormente procesadas en el interior del rover.
En el cuerpo principal se alojan los laboratorios internos SAM (Sample Analysis at Mars) y CheMin (Chemistry and Mineralogy), encargados de los análisis más complejos. SAM examina los gases liberados al calentar las muestras y busca compuestos orgánicos y moléculas relacionadas con procesos biológicos. CheMin utiliza difracción de rayos X para identificar los minerales presentes y determinar si se formaron en ambientes acuosos. Junto a ellos, el instrumento RAD (Radiation Assessment Detector) mide la radiación cósmica y solar, información esencial para la evaluación de riesgos en futuras misiones tripuladas.
El rover incorpora también el instrumento REMS (Rover Environmental Monitoring Station), desarrollado en España, que monitoriza la temperatura, la presión atmosférica, el viento, la humedad y la radiación ultravioleta en la superficie marciana. Completan la carga útil el detector DAN (Dynamic Albedo of Neutrons), que mide el contenido de hidrógeno en el subsuelo como indicador de agua o hielo, y el conjunto MEDLI (Mars Science Laboratory Entry, Descent, and Landing Instrumentation), utilizado durante el descenso para registrar las condiciones aerotérmicas de la atmósfera marciana.
En conjunto, estos sistemas convierten a Curiosity en un laboratorio científico móvil capaz de realizar experimentos de geología, geoquímica y climatología directamente sobre la superficie marciana. Su funcionamiento prolongado, más de una década después del aterrizaje, continúa proporcionando datos esenciales para comprender la evolución del planeta y para planificar futuras misiones de exploración humana. ⬆
El cráter Gale de Marte, lugar del aterrizaje
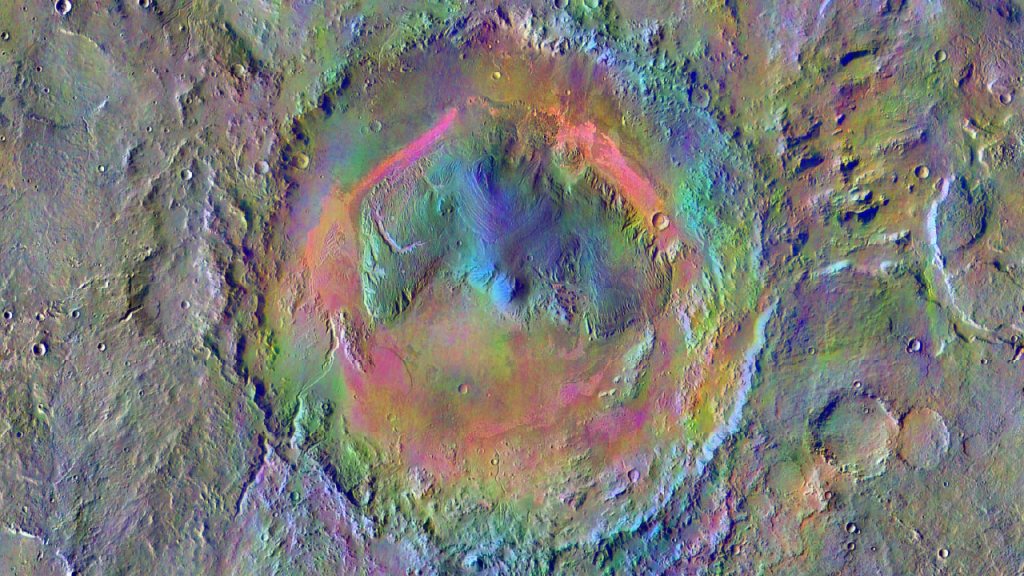
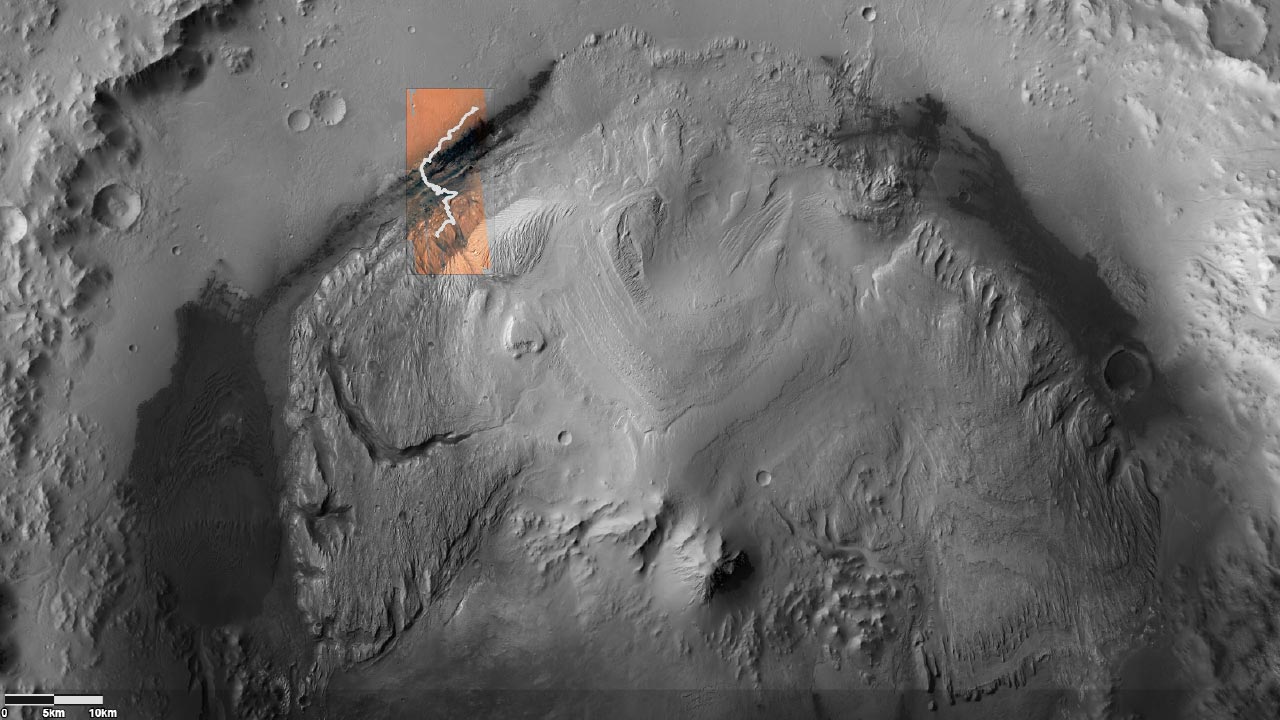
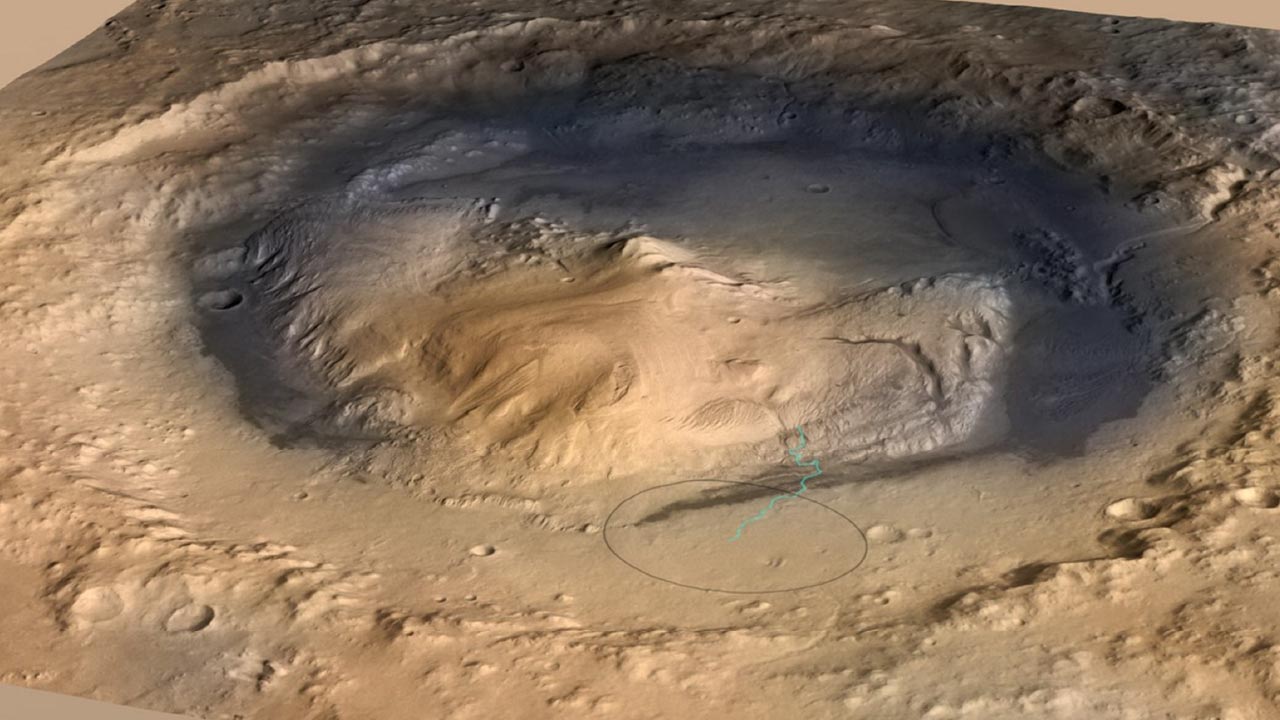
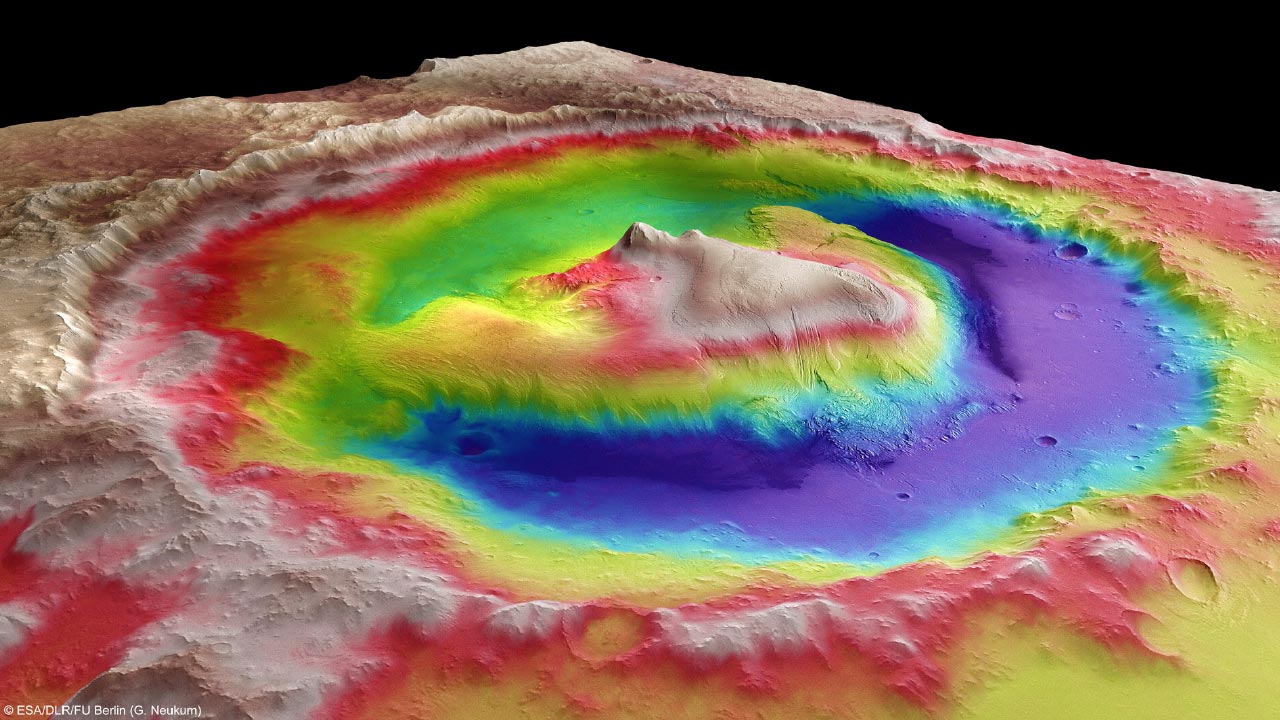
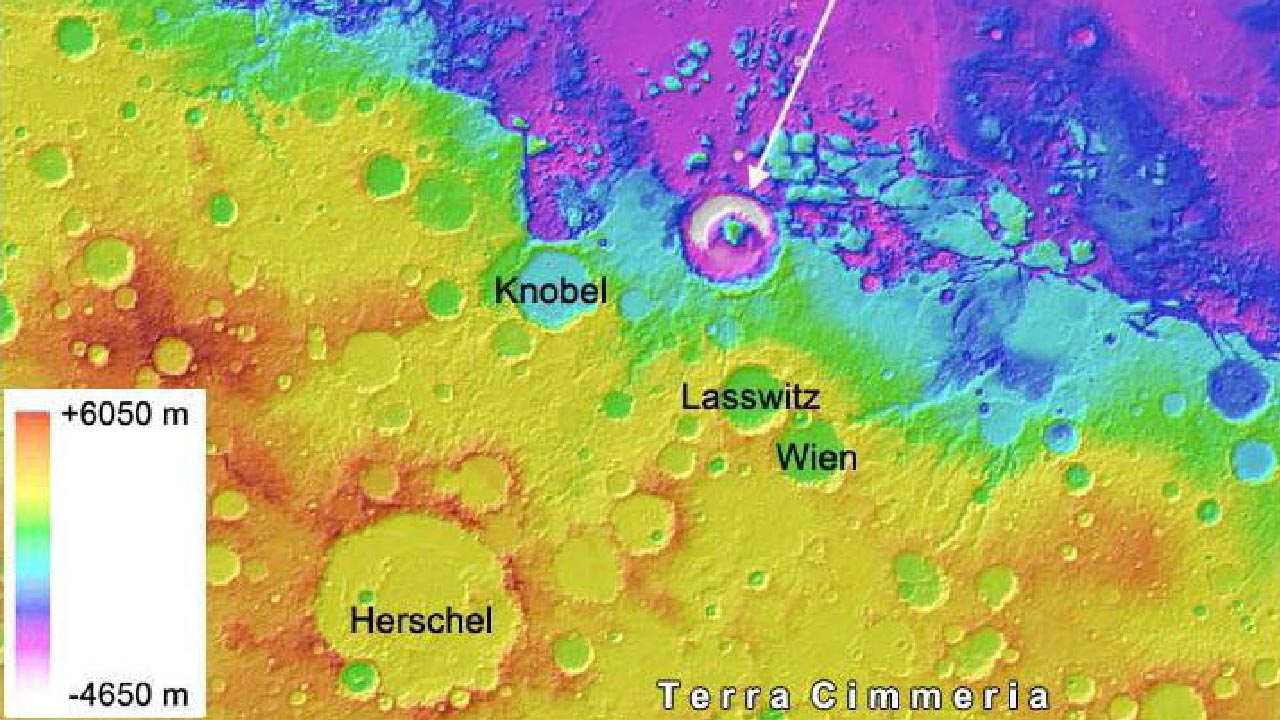
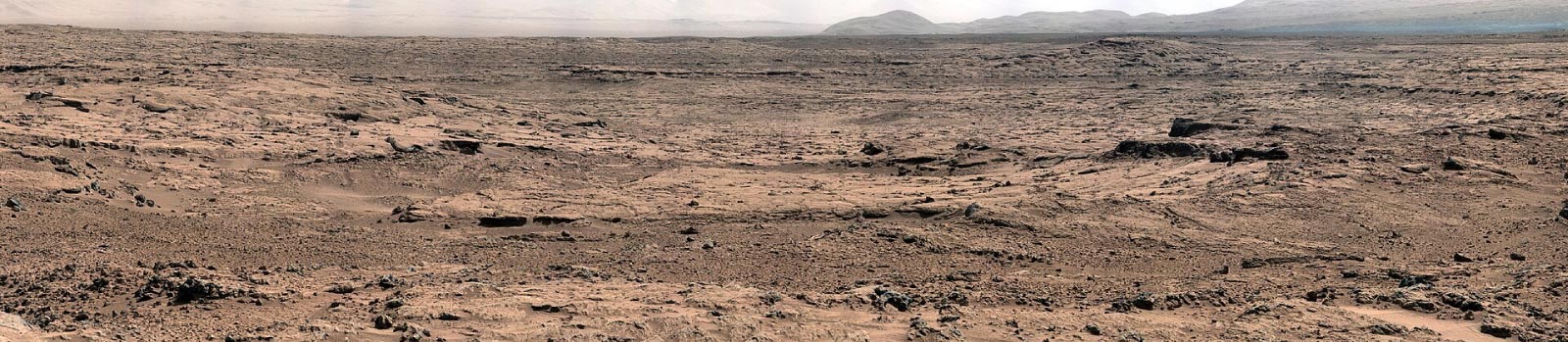
El lugar de aterrizaje del rover Curiosity fue seleccionado tras una cuidadosa evaluación científica entre más de sesenta candidatos. El cráter Gale, de 154 km de diámetro, se sitúa al norte del ecuador marciano y conserva un registro geológico excepcional que abarca gran parte de la historia del planeta. En su centro se eleva el monte Sharp (oficialmente Aeolis Mons), una montaña de más de 5.000 m de altura formada por la acumulación de sedimentos en sucesivas etapas de deposición. Esta característica lo convierte en un entorno ideal para estudiar la transición de un Marte antiguo, más cálido y húmedo, hacia las condiciones frías y áridas actuales.
Las imágenes orbitales previas al aterrizaje mostraron valles, deltas y abanicos aluviales en el borde del cráter, lo que indica la acción prolongada del agua. Las capas sedimentarias del monte Sharp presentan diferentes composiciones minerales, con arcillas en las zonas más bajas y sulfatos en las superiores, lo que sugiere una evolución ambiental progresiva. Curiosity se posó en la región conocida como Aeolis Palus, entre el pie del monte y la base del cráter, desde donde ha avanzado gradualmente hacia el interior.
El estudio de Gale ha permitido confirmar que el cráter albergó antiguos lagos estables durante millones de años. Los análisis realizados por el rover muestran que esos ambientes eran neutros o ligeramente alcalinos, y contenían los elementos químicos esenciales para la vida, como carbono, hidrógeno, oxígeno, nitrógeno, azufre y fósforo. Además, la detección de minerales arcillosos formados en presencia de agua respalda la hipótesis de que existieron condiciones habitables en el pasado.
A medida que Curiosity asciende por las laderas del monte Sharp, analiza estratos cada vez más antiguos, lo que permite reconstruir con detalle la evolución geológica y climática del planeta. El cráter Gale continúa siendo un punto de referencia para el estudio comparado de los procesos sedimentarios y ambientales en Marte, y constituye uno de los entornos más estudiados fuera de la Tierra.
Antecedentes de la misión
La misión Mars Science Laboratory (MSL), que dio origen al rover Curiosity, fue concebida a comienzos de la década de 2000 como el siguiente paso en la estrategia de exploración marciana de la NASA tras los éxitos de los rovers Spirit y Opportunity. Estas misiones, lanzadas en 2003, demostraron la viabilidad de operar vehículos móviles sobre la superficie marciana y confirmaron la existencia pasada de agua líquida en el planeta, sentando las bases para una exploración centrada en la habitabilidad.
En 2004 la NASA aprobó oficialmente el desarrollo del Mars Science Laboratory con el objetivo de crear un laboratorio científico móvil capaz de analizar muestras de suelo y roca directamente en Marte. En ese momento, la agencia mantenía una activa presencia en el planeta con las sondas Mars Odyssey y Mars Global Surveyor en órbita, junto con los rovers Spirit y Opportunity en superficie. Poco después se unirían Mars Reconnaissance Orbiter, lanzada en 2005, y la sonda europea Mars Express, que aportaba observaciones complementarias desde 2003. Este conjunto de misiones proporcionó un conocimiento orbital y geológico esencial para planificar el diseño y el aterrizaje de Curiosity.
El proyecto, gestionado por el Jet Propulsion Laboratory (JPL), implicó el desarrollo de un vehículo de mayor tamaño y capacidad científica que sus predecesores. El incremento de masa exigió una innovación radical en la fase de descenso: el sistema de grúa aérea o “sky crane”, que permitiría depositar el rover suavemente sobre la superficie sin utilizar airbags. Además, se incorporaron un generador termoeléctrico de radioisótopos para su alimentación continua, nuevos instrumentos analíticos internos y una arquitectura reforzada que garantizara su operatividad durante años.
Tras una etapa de ensayos prolongada, la misión fue finalmente aprobada para su lanzamiento en 2011. Con Curiosity, la NASA consolidaba una nueva fase en la exploración marciana, orientada no solo a identificar agua o minerales, sino a determinar si el planeta había sido alguna vez un entorno capaz de sostener vida.
Desarrollo de la misión del rover Curiosity
Lanzamiento del rover Curiosity
El rover Curiosity fue lanzado el 26 de noviembre de 2011 a las 15:02 UTC desde la Base de Cabo Cañaveral (Florida, Estados Unidos) a bordo de un cohete Atlas V 541, una de las configuraciones más potentes de esta familia de lanzadores. La etapa superior Centaur fue la encargada de proporcionar el impulso necesario para escapar de la órbita terrestre y colocar la nave en una trayectoria interplanetaria hacia Marte. El conjunto tenía una masa total de unas 3,9 toneladas, de las cuales cerca de 900 kg correspondían al rover y el resto al módulo de crucero y al sistema de entrada, descenso y aterrizaje.
El despegue se desarrolló sin incidencias y, tras poco más de una hora de vuelo, la nave se separó de la etapa Centaur y comenzó su trayectoria heliocéntrica. Durante los primeros días se llevaron a cabo comprobaciones de los sistemas de comunicación, navegación y control térmico, confirmando el correcto funcionamiento de la sonda y la estabilización de su rotación a 2 rpm. La energía se suministraba mediante paneles solares instalados en el módulo de crucero, mientras que las comunicaciones se mantenían por radiofrecuencia en banda X con las antenas de la Red del Espacio Profundo (Deep Space Network, DSN) de la NASA.

Viaje interplanetario y las maniobras de corrección de trayectoria
A lo largo del trayecto se llevaron a cabo varias maniobras de corrección de trayectoria (TCM, Trajectory Correction Maneuver) destinadas a ajustar la ruta hacia el punto de entrada planificado sobre Marte. La primera de ellas, realizada a mediados de diciembre de 2011, permitió afinar la orientación inicial tras el lanzamiento; las siguientes se efectuaron en los meses posteriores con correcciones progresivamente menores.
Durante esta fase también se verificaron los sistemas de comunicación, navegación y separación de los distintos elementos del vehículo, incluidos el escudo térmico, el paracaídas y el sistema de descenso. Las pruebas confirmaron el correcto estado de todos los subsistemas, lo que permitió mantener la configuración nominal sin incidencias hasta las semanas previas a la llegada al planeta.
El crucero interplanetario concluyó con una trayectoria precisa hacia Marte, que situó al vehículo en condiciones óptimas para el inicio de la fase de entrada, descenso y aterrizaje sobre el cráter Gale.
Entrada, descenso y aterrizaje del rover Curiosity en el cráter Gale
Tras un viaje interplanetario de casi nueve meses, el módulo de descenso del Mars Science Laboratory inició su aproximación final a Marte durante la madrugada del 6 de agosto de 2012, hora UTC. La fase de entrada, descenso y aterrizaje (EDL, por sus siglas en inglés) fue completamente autónoma, debido al retraso en las comunicaciones con la Tierra, y se desarrolló en poco más de siete minutos. La secuencia combinó por primera vez tres sistemas consecutivos: escudo térmico, paracaídas supersónico y una grúa aérea o “sky crane”, diseñada para depositar suavemente al rover sobre la superficie.
El módulo ingresó en la atmósfera marciana a una velocidad cercana a 5,9 km/s. Durante la primera parte del descenso, el escudo térmico protegió a la nave de las temperaturas extremas generadas por la fricción, que superaron los 2.000 °C. A unos 11 km de altitud, el escudo se separó y se desplegó un paracaídas de 16 m de diámetro, que redujo la velocidad hasta unos 300 m/s. Poco después, el radar de altitud y velocidad comenzó a calcular los parámetros de aterrizaje y el sistema de guiado ejecutó pequeños ajustes de orientación para dirigir la trayectoria hacia el punto previsto dentro del cráter Gale.
Vídeo con la recreación y seguimiento en tiempo real del aterrizaje del rover Curiosity en Marte el 6 de agosto de 2012. Incluye la secuencia de entrada, descenso y aterrizaje, junto con las reacciones del equipo de control de la misión en el JPL. Créditos: NASA/JPL-Caltech.
A unos 2 km del suelo, el módulo de descenso se desprendió del paracaídas y activó ocho motores de control vectorial que estabilizaron el descenso. En los últimos segundos, el sistema “sky crane” descendió al rover mediante tres cables de nailon de 7,5 m de longitud, depositándolo sobre la superficie a una velocidad de apenas 0,75 m/s. Una vez confirmada la toma de contacto, los cables se cortaron y el módulo de descenso se alejó para estrellarse a distancia segura. La señal de aterrizaje fue recibida por la sonda Mars Odyssey y retransmitida a la Tierra, confirmando el éxito de la maniobra.
Curiosity se posó en la región conocida como Aeolis Palus, dentro del cráter Gale, en un punto posteriormente denominado Bradbury Landing. Minutos después envió sus primeras imágenes mediante las cámaras de navegación y las Hazcams, mostrando el terreno circundante y el horizonte del monte Sharp. Los datos iniciales confirmaron el buen estado de todos los sistemas mecánicos, eléctricos y científicos, iniciándose así la fase de verificación y calibración de instrumentos que precedió a las primeras operaciones científicas sobre la superficie marciana.

Puesta en marcha y primer entorno: Bradbury Landing – Glenelg – Yellowknife Bay (2012–2013)
Durante las primeras semanas tras el aterrizaje, el rover Curiosity dedicó sus operaciones a la comprobación de sistemas, calibración de instrumentos y adquisición de imágenes panorámicas del entorno inmediato. Una vez finalizadas estas tareas, el equipo científico seleccionó como primer objetivo la región de Glenelg, situada a unos 400 m al este del punto de aterrizaje. Este lugar presentaba la intersección de tres unidades geológicas distintas: un terreno liso cercano al punto de toma de contacto, una superficie más erosionada y una zona con afloramientos brillantes visibles desde órbita, lo que lo convertía en un punto de gran interés para los primeros análisis.
El desplazamiento hacia Glenelg comenzó en septiembre de 2012 y permitió poner a prueba el sistema de navegación autónoma y el rendimiento de las ruedas sobre distintos tipos de suelo. Durante el trayecto se realizaron los primeros análisis de rocas con el instrumento ChemCam y mediciones ambientales con la estación REMS. En diciembre, Curiosity alcanzó la zona denominada Yellowknife Bay, donde se identificaron formaciones sedimentarias finamente estratificadas compuestas por lutitas, lo que sugería la antigua presencia de agua estable en superficie.
En febrero de 2013, el rover llevó a cabo la primera perforación en una roca denominada “John Klein”, obteniendo muestras internas que fueron analizadas por los laboratorios SAM y CheMin. Los resultados mostraron la presencia de minerales arcillosos, azufre, fósforo, nitrógeno y carbono, junto con un pH neutro, características compatibles con un ambiente habitable en el pasado. Meses después se repitió la operación en un punto cercano, “Cumberland”, confirmando la naturaleza lacustre de los depósitos y reforzando la interpretación de Yellowknife Bay como un antiguo sistema de fondo de lago.
Ascenso hacia Pahrump Hills: inicio del estudio estratigráfico del monte Sharp (2014–2015)
Tras más de un año de operaciones en el entorno de Yellowknife Bay, el rover Curiosity emprendió en 2014 su desplazamiento hacia el suroeste, en dirección al monte Sharp, la estructura central del cráter Gale. Durante el trayecto, de unos ocho kilómetros, se observó una transición gradual entre los depósitos finos lacustres y terrenos cada vez más cementados y ricos en óxidos de hierro. Esta variación mineralógica marcaba el inicio de una nueva etapa científica centrada en el estudio estratigráfico de las capas sedimentarias que componen la base del monte.
A finales de ese año, el rover alcanzó la zona de Pahrump Hills, el primer conjunto de estratos situados al pie del monte Sharp. Las imágenes tomadas por la cámara Mastcam revelaron una secuencia de laminaciones finas y superficies erosionadas, indicativas de una sedimentación lenta en ambientes de agua poco profunda. El análisis espectroscópico confirmó la presencia de arcillas y hematita, minerales que se forman en condiciones húmedas y con variaciones locales en el nivel de oxidación, lo que sugiere episodios de cambio ambiental.

Durante esta fase se ensayó una nueva estrategia de muestreo más selectiva, centrada en identificar cambios composicionales entre capas próximas. Curiosity perforó varias rocas del área, entre ellas “Confidence Hills” y “Mojave 2”, cuyos análisis mostraron una progresión desde materiales ricos en arcillas hacia otros más oxidados, reflejando una evolución climática hacia condiciones más secas. Los datos obtenidos en Pahrump Hills establecieron el punto de partida de la secuencia estratigráfica del monte Sharp y consolidaron la evidencia de que la historia geológica del cráter registraba alternancias entre periodos húmedos y áridos a lo largo de millones de años.
Análisis de los procesos eólicos en los campos de dunas Bagnold (2015–2016)
A finales de 2015, el rover Curiosity llegó a los campos de dunas Bagnold, una extensa franja de acumulaciones arenosas situada al noroeste del monte Sharp. Estas dunas constituyen el primer sistema eólico activo estudiado directamente en otro planeta, lo que permitió analizar en detalle los mecanismos de transporte y depósito de arena bajo las condiciones marcianas. La región, identificada previamente en imágenes orbitales, muestra crestas móviles y ondulaciones de diferente escala, configuradas por vientos predominantes del noroeste.
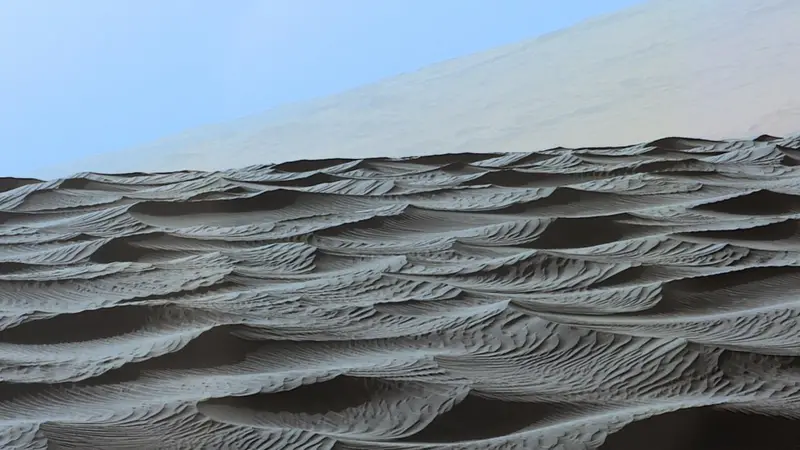
Durante su estancia en la zona, el rover examinó varias dunas individuales, entre ellas Namib y High Dune, caracterizadas por arenas de grano fino y una textura superficial que revela procesos de migración reciente. Las cámaras Mastcam y MAHLI documentaron la morfología de las crestas, mientras que los análisis de composición indicaron una concentración elevada de olivino y piroxenos, minerales comunes en basaltos poco alterados. Estos resultados confirmaron que las arenas provenían de la erosión de materiales volcánicos cercanos, transportados por la acción del viento.
Curiosity realizó experimentos destinados a comprender cómo se mueven las partículas en la atmósfera marciana, mucho menos densa que la terrestre. Las observaciones de secuencias temporales mostraron desplazamientos medibles de granos y microdunas en cuestión de días, demostrando que el viento actual sigue siendo un agente activo de modificación superficial. Además, el estudio de la compactación y de la distribución granulométrica proporcionó datos esenciales para interpretar estructuras sedimentarias similares en el registro geológico del monte Sharp.

Recuperación del taladro y optimización de los sistemas de muestreo (2016–2018)
Durante los años 2016 y 2017, la misión Curiosity afrontó una de las etapas técnicas más complejas desde su llegada a Marte. A finales de 2016 se detectó un fallo en el mecanismo de avance del taladro (“feed mechanism”), encargado de empujar la broca contra las rocas durante las perforaciones. El problema obligó a suspender temporalmente las operaciones de muestreo y a desarrollar desde la Tierra un nuevo método de perforación que no dependiera de ese sistema, garantizando la continuidad científica del programa.
Animación interactiva en 360º del entorno de Ogunquit Beach, capturada por el rover Curiosity durante las pruebas del nuevo sistema de perforación en 2017. La vista muestra el terreno arenoso y las capas inferiores del monte Sharp en el horizonte. Créditos: NASA/JPL-Caltech.
El equipo del Jet Propulsion Laboratory diseñó un procedimiento alternativo denominado “feed extended drilling” (FED), que permitía perforar aplicando el empuje directamente desde el brazo robótico, sin el uso del mecanismo interno averiado. Este método requirió una completa actualización del software de a bordo, así como la calibración de sensores para controlar la presión y la estabilidad durante la perforación. Las primeras pruebas se realizaron en 2017 en el área de Ogunquit Beach, antes de retomar la extracción de muestras en el monte Sharp.
En 2018, Curiosity completó con éxito su primera perforación bajo este nuevo sistema en la roca “Duluth”. Posteriormente, los procedimientos se perfeccionaron para permitir la entrega directa del material pulverizado a los laboratorios internos SAM y CheMin mediante vibraciones controladas del brazo, evitando el uso del antiguo sistema de transferencia. Este logro devolvió al rover su plena capacidad analítica y demostró la adaptabilidad operativa del programa ante contingencias imprevistas.

La cresta Vera Rubin y los indicios de oxidación en el monte Sharp (2017–2019)
Entre 2017 y 2019, el rover Curiosity centró sus operaciones en una prominencia geológica conocida como Vera Rubin Ridge, una elevación alargada situada sobre los niveles explorados en Pahrump Hills. Desde órbita, esta zona había mostrado una intensa firma espectral de hematita, un óxido de hierro que se forma en presencia de agua y cuya distribución podía ofrecer información clave sobre los procesos de oxidación y las variaciones químicas del ambiente marciano.
Durante el ascenso a la cresta, el rover examinó la textura y composición de las rocas mediante observaciones detalladas con Mastcam y ChemCam. Los resultados revelaron una sucesión de capas compactas y fracturadas con diferencias de coloración asociadas a cambios en el grado de oxidación del hierro. En algunos sectores, las rocas presentaban cementaciones y venas de minerales precipitados a partir de fluidos, indicios de circulación de agua subterránea posterior al depósito de los sedimentos.
Curiosity perforó varias muestras representativas, entre ellas “Mojave 2” y “Rock Hall”, cuyos análisis confirmaron la abundancia de hematita y una composición compatible con procesos redox en ambientes de transición entre condiciones húmedas y más áridas. Estos resultados sugieren que la cresta Vera Rubin marcó una fase de cambio ambiental, posiblemente vinculada a una fluctuación en el nivel del agua o a la exposición prolongada a la atmósfera.

Glen Torridon y la unidad rica en arcillas: un entorno de antigua estabilidad lacustre (2019–2021)
A comienzos de 2019, el rover Curiosity alcanzó la región denominada Glen Torridon, situada en una depresión entre la cresta Vera Rubin y las capas superiores del monte Sharp. Las observaciones orbitales habían revelado en esta zona una intensa firma espectral de filosilicatos, minerales arcillosos que se forman en presencia prolongada de agua. El estudio de este entorno permitió examinar los depósitos más representativos del antiguo sistema lacustre del cráter Gale, así como determinar la extensión temporal y química de las condiciones habitables que allí existieron.
Durante su avance por Glen Torridon, Curiosity llevó a cabo una campaña intensiva de perforaciones, entre ellas “Aberlady”, “Kilmarie” y “Glen Etive”, que proporcionaron muestras con la mayor concentración de minerales arcillosos detectada hasta la fecha por la misión. Los análisis de CheMin confirmaron la presencia de esmectitas y otros filosilicatos asociados a ambientes de sedimentación fina y neutra, mientras que el laboratorio SAM identificó compuestos orgánicos complejos estables a altas temperaturas. Estos hallazgos consolidaron la interpretación de que la zona preserva un registro químico y mineralógico excepcionalmente bien conservado.
El paisaje de Glen Torridon mostró evidencias de procesos de desecación intermitente, con grietas poligonales y capas interrumpidas por materiales arenosos, indicios de fluctuaciones periódicas en el nivel del agua. La superposición de arcillas y óxidos de hierro sugiere transiciones químicas ligadas a variaciones en la disponibilidad de agua y al intercambio con la atmósfera. Este entorno ofreció un laboratorio natural para comparar los efectos de la alteración acuosa con los de la oxidación progresiva que caracterizó etapas posteriores del monte Sharp.
La unidad de sulfatos y Gediz Vallis: transición hacia ambientes secos y depósitos de alta energía (2021–presente)

Desde 2021, el rover Curiosity explora los niveles más altos del monte Sharp, dentro de una franja geológica conocida como la unidad de sulfatos. Esta capa forma parte de una extensa secuencia sedimentaria depositada tras el retroceso de los antiguos lagos que llenaron el cráter Gale, cuando el clima marciano comenzó a evolucionar hacia un régimen más seco. Las observaciones realizadas por el rover y por las sondas orbitales indican que esta transición estuvo acompañada por una intensa actividad de evaporación, responsable de la acumulación de sulfatos de calcio, magnesio y sodio en los sedimentos. El estudio de esta unidad permite comprender cómo y cuándo Marte perdió su capacidad para mantener agua líquida de forma estable en superficie.
Durante el ascenso por el monte Sharp, Curiosity ha analizado una serie de afloramientos que muestran rasgos de desecación progresiva. Las imágenes de Mastcam y MAHLI revelan estructuras de grietas de retracción, pequeñas vetas cristalinas y laminaciones interrumpidas por arenas gruesas, que sugieren ciclos alternos de humectación y evaporación. En varios puntos se detectaron depósitos cementados por sales, lo que confirma que el agua subsuperficial persistió temporalmente tras la desaparición de los lagos. Estos datos apoyan la hipótesis de un cambio climático gradual, en lugar de una transición abrupta hacia la aridez global.

Entre 2022 y 2023, el rover centró su trabajo en la ladera occidental del monte Sharp, donde se cartografiaron distintas unidades de sulfatos mediante imágenes panorámicas y estudios químicos. Los análisis con ChemCam y SAM detectaron la coexistencia de sulfatos hidratados y óxidos de hierro, indicio de procesos redox complejos en un entorno en lenta transformación. En esta etapa, Curiosity realizó varias perforaciones exitosas, entre ellas “Canaima”, “Sequoia” y “Encanto”, que permitieron estudiar cómo las sales y los sulfatos se integran en la matriz sedimentaria. Las muestras mostraron una diversidad mineral notable, con trazas de yeso y jarosita, minerales típicos de ambientes evaporíticos sometidos a variaciones en la acidez y la disponibilidad de agua.

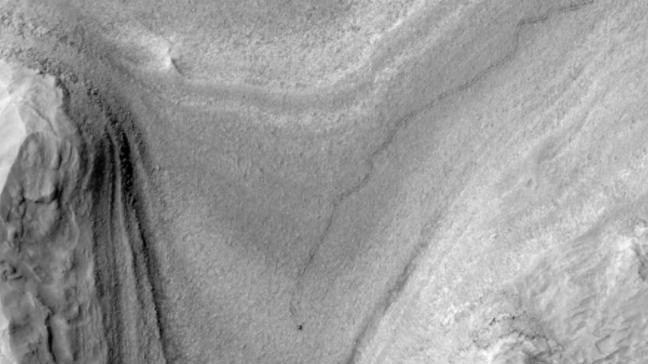
Uno de los principales focos de investigación ha sido Gediz Vallis, un canal erosivo que corta la parte media del monte Sharp y que conserva abanicos de detritos y bloques transportados por flujos de alta energía. Las imágenes obtenidas por Curiosity y los modelos topográficos derivados de sus cámaras indican que estos depósitos se originaron en episodios breves pero intensos, posiblemente causados por deshielos locales o lluvias excepcionales en un clima ya muy seco. La composición de los materiales de Gediz Vallis muestra fragmentos arrancados de niveles superiores del monte, lo que ofrece una oportunidad única para estudiar rocas que el rover no puede alcanzar directamente.

En 2024, la misión inició la caracterización detallada de los abanicos de Gediz Vallis, combinando observaciones panorámicas, espectroscopía y análisis de textura. Los resultados preliminares apuntan a un ambiente dominado por corrientes episódicas, capaces de movilizar bloques de hasta medio metro de diámetro, seguidas por largos periodos de calma eólica. Este tipo de depósitos proporciona una evidencia geológica directa de la existencia de agua líquida en una de las últimas etapas de actividad hidrológica del planeta.

A nivel operativo, Curiosity continúa plenamente funcional en Marte. Aunque sus ruedas muestran desgaste y algunos motores han reducido su velocidad, el generador termoeléctrico de radioisótopos mantiene un suministro estable de energía, y las actualizaciones de software realizadas en 2023 mejoraron la autonomía en la planificación de recorridos y el uso del brazo robótico. La misión extendida, aprobada por la NASA hasta al menos 2026, tiene como objetivo continuar el ascenso por el monte Sharp, explorar las capas superiores de la unidad de sulfatos y documentar la transición final hacia los depósitos áridos que marcan el cierre de la historia lacustre del cráter Gale.
Galería de imágenes de la misión Curiosity

Rueda de Curiosity fotografiada el 22 de abril de 2025 (sol 4.518), mostrando los efectos acumulados tras más de una década en Marte.
Créditos: NASA/JPL-Caltech
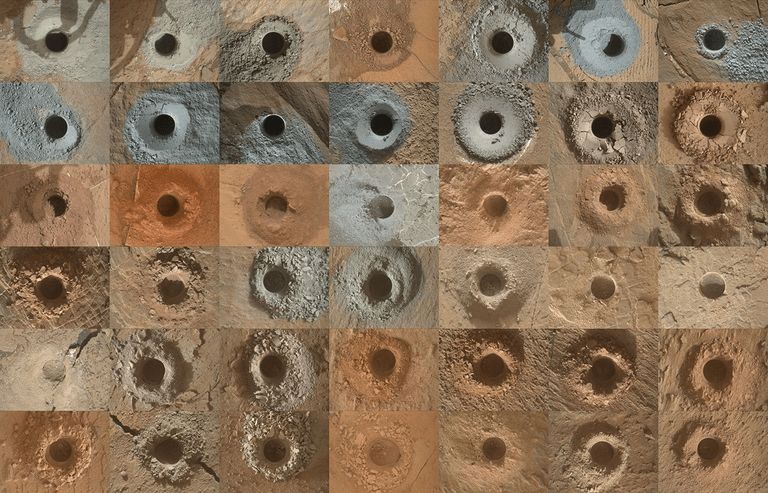
Las 42 perforaciones realizadas por el rover Curiosity desde su llegada a Marte. La primera, “John Klein”, fue perforada en febrero de 2013, y la más reciente, “Kings Canyon”, en agosto de 2024. Cada orificio tiene un diámetro de 16 mm y las imágenes fueron tomadas por la cámara MAHLI.
Créditos: NASA/JPL-Caltech

Composición artística sobre una imagen en blanco y negro tomada por el rover Curiosity en Marte.
Créditos: NASA/JPL-Caltech
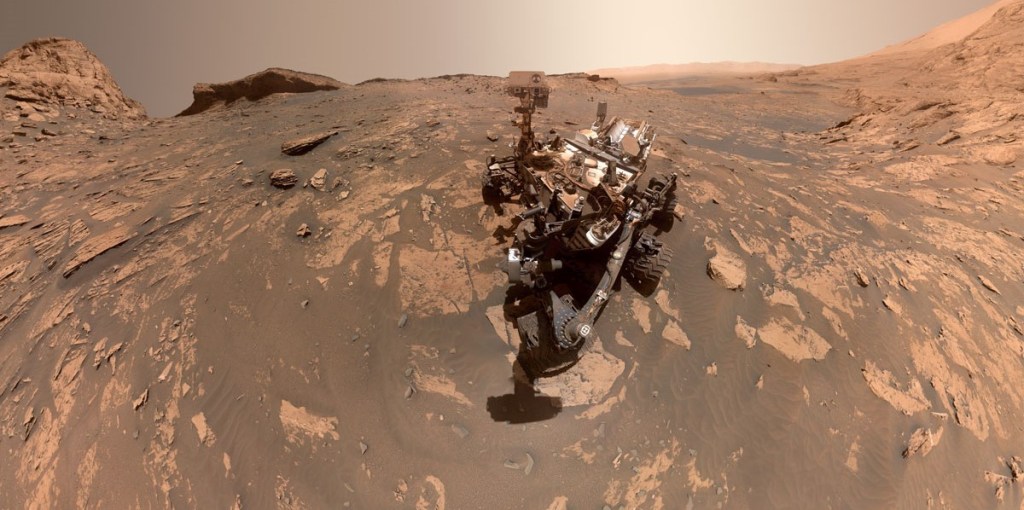
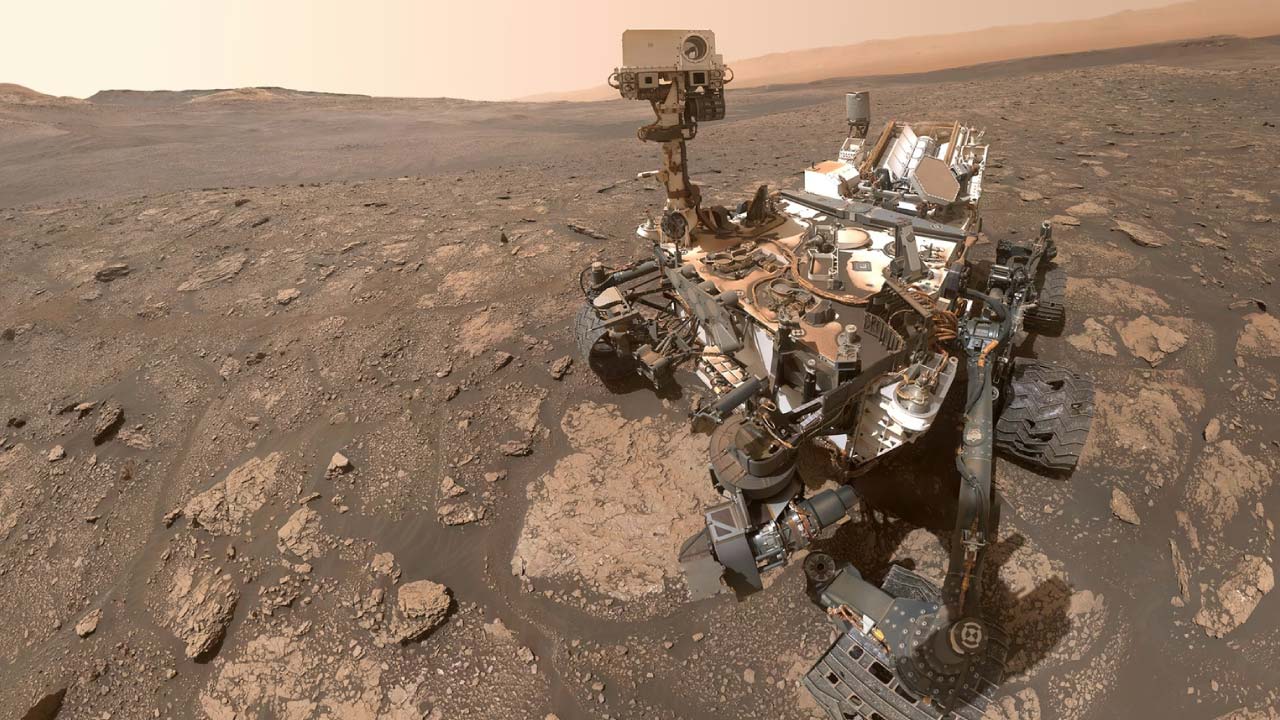
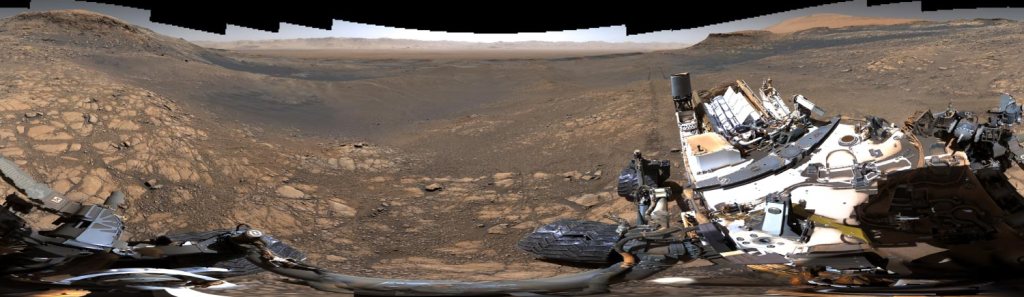
Selfie panorámico de 360º compuesto por 81 imágenes individuales tomadas por la cámara MAHLI del rover Curiosity en noviembre de 2021.
Créditos: NASA/JPL-Caltech

Póster conmemorativo del décimo aniversario del Curiosity en la superficie de Marte.
Créditos: NASA

Nubes captadas por el rover Curiosity en el Sol 2410 (17 de mayo de 2019).
Créditos: NASA/JPL-Caltech

El Sol descendiendo sobre el horizonte marciano en el cráter Gale, captado el 15 de abril de 2015 (sol 956) por el rover Curiosity.
Créditos: NASA/JPL-Caltech/MSSS/Texas A&M University

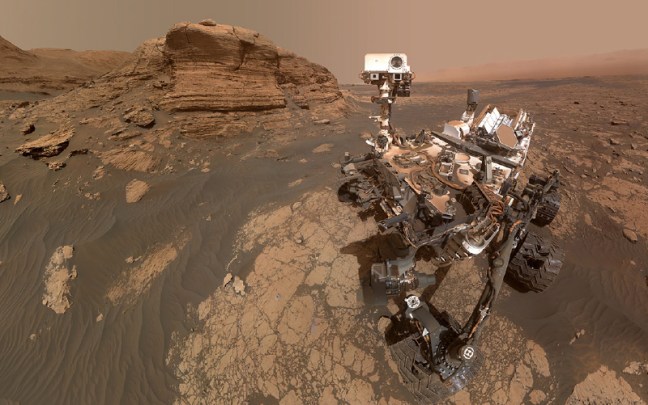
Selfie del rover Curiosity en la zona denominada «Windjam» en el Sol 613 de su misión, el 27 de abril de 2014.
Créditos: NASA/JPL-Caltech
La cámara HiRISE de la Mars Reconnaissance Orbiter captó al rover Curiosity el 26 de marzo de 2014, cuando se encontraba en el borde de un afloramiento rocoso.
Créditos: NASA/JPL-Caltech/University of Arizona

La cámara HiRISE de la Mars Reconnaissance Orbiter captó al rover Curiosity el 26 de marzo de 2014, cuando se encontraba en el borde de un afloramiento rocoso.
Créditos: NASA/JPL-Caltech/University of Arizona

Vista del Curiosity del suelo marciano y cantos rodados después de cruzar la duna de arena «Dingo Gap» en febrero de 2014.
Créditos: NASA/JPL-Caltech/MSSS
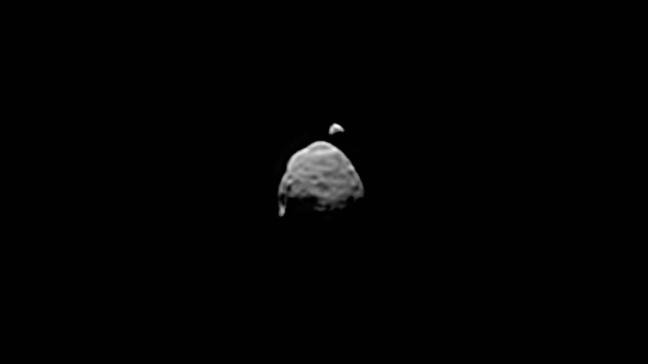
Vista del tránsito de Fobos delante de Deimos tomada por Curiosity el 1 de agosto de 2013.
Créditos: NASA/JPL-Caltech/MSSS/Texas A&M

Autoretrato del rover Curiosity en la zona denominada «John Klein» en el Sol 177 de su misión, el 3 de febrero de 2013.
Créditos: NASA/JPL-Caltech
Panorámica del rover Curiosity en «Namib Dunes»
Créditos: NASA/JPL-Caltech

Selfie del rover Curiosity en la zona denominada «Rocknest» el 31 de octubre de 2011 en el Sol 84 de su misión.
Créditos: NASA/JPL-Caltech
El Curiosity descendiendo sobre Marte captado por la cámara HiRISE de la sonda Mars Reconnaissance Orbiter.
Créditos: NASA/JPL-Caltech

Tres generaciones de rovers marcianos: el modelo de vuelo de Sojourner (1997); un vehículo de pruebas del Mars Exploration Rover (Spirit/Opportunity, 2004); y prototipo del Mars Science Laboratory (Curiosity, 2012).
Créditos: NASA/JPL-Caltech
Ingenieros del JPL instalan y prueban las seis ruedas del rover Curiosity el 9 de julio de 2010, durante su ensamblaje en una sala limpia de Pasadena, California.
Créditos: NASA/JPL-Caltech
Referencias y más información:
- ¿Donde está el Curiosity?, localización del rover en Marte
- Página oficial de la misión Curiosity de la NASA
- Mars Science Laboratory – Curiosity – NASA Jet Propulsion Laboratory (JPL)
Misiones espaciales a Marte en No Sólo Sputnik!:
























Explora el planeta Marte

Conoce las características de Marte, cuarto planeta del sistema solar y segundo más pequeño, principal destino de las misiones científicas

La superficie de Marte, un árido y seco mundo con gigantes volcanes, grandes cañones y vastas llanuras, futura casa para la humanidad

Amplía información sobre la atmósfera de Marte, su dinámica, vientos y tormentas de polvo que en ocasiones cubren todo el planeta

Conoce las dificultades para llegar y la exploración de Marte, objetivo prioritario para las principales agencias espaciales

Cronología de la exploración de Marte, desde los primeros intentos soviéticos por llegar al planeta rojo hasta el rover Perseverance de la NASA o la misión Tianwen 1 china, últimas en llegar a Marte

La enorme velocidad de las naves y la ligera atmósfera marciana provocan una gran tasa de fracasos en los amartizajes en Marte. Conoce cuántas misiones lo han logrado
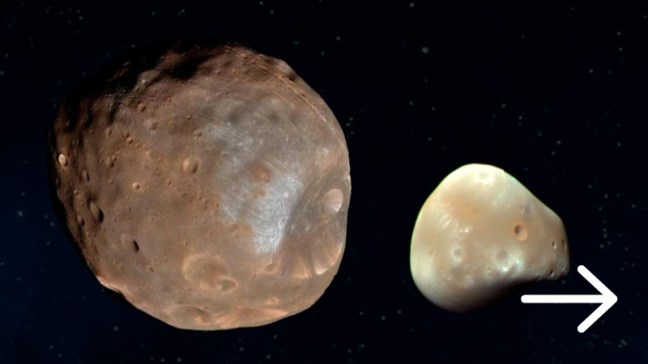
Conoce los pequeños satélites de Marte, Fobos y Deimos, y cómo su enigmático origen guarda el secreto del pasado del planeta rojo.


