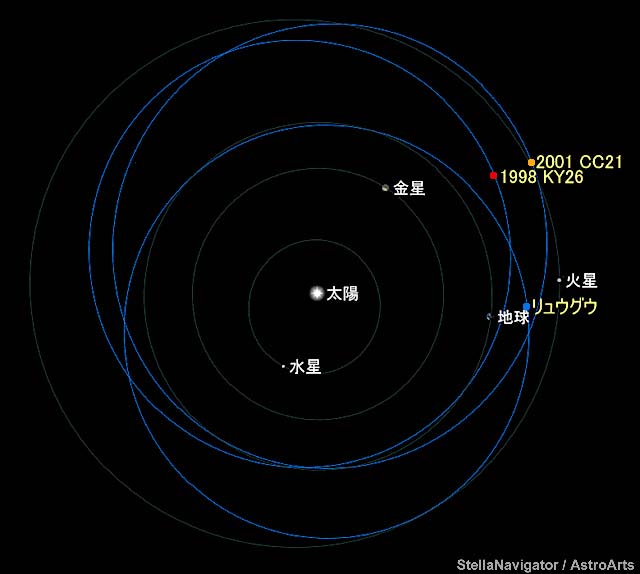
Tras devolver 5,4 gramos del asteroide Ryugu en 2020, Hayabusa 2 continúa en misión extendida hacia los asteroides Torifune y 1998 KY26
Misión en su misión extendida
Objetivos:
Retorno de muestras de un asteroide cercano a la Tierra
Nave espacial:
Hayabusa 2
Fecha de lanzamiento:
3 de diciembre de 2014
Lanzador:
H-IIA 202
Lugar de lanzamiento:
Centro Espacial de Tanegashima, Japón
Control de misión:
JAXA/ISAS
Hayabusa 2 es la segunda misión japonesa dedicada al retorno de muestras de un asteroide. Investigó el asteroide cercano 162173 Ryugu mediante navegación óptica autónoma, propulsión iónica y un conjunto de subsondas para el estudio de la superficie. Realizó dos operaciones de toma de muestras, generó un cráter artificial para acceder a materiales poco alterados y caracterizó la estructura y composición del asteroide. En diciembre de 2020 entregó en la Tierra 5,4 gramos de regolito y comenzó una misión extendida que la llevará a sobrevolar Torifune en 2026 y a estudiar el asteroide 1998 KY26 en 2031.

Objetivos de la misión Hayabusa 2
La misión fue diseñada para obtener muestras de un asteroide de tipo C y analizar en laboratorio materiales poco alterados desde las primeras etapas del Sistema Solar. El estudio detallado de estos granos permite reconstruir la evolución térmica y química de los planetesimales, la presencia y distribución de compuestos orgánicos y volátiles y los procesos que moldean la superficie de los asteroides cercanos.
El plan científico incluía caracterizar la forma, la estructura interna, la mineralogía y las propiedades físicas de Ryugu mediante observación remota, experimentos de impacto y mediciones térmicas y espectrales. La misión también debía validar tecnologías clave para la exploración de pequeños cuerpos, como la navegación autónoma en microgravedad, el uso sostenido de propulsión iónica, la generación controlada de un cráter artificial y el retorno seguro de muestras en una cápsula sellada.
Características de la misión Hayabusa 2
Hayabusa 2 es una nave de 600 kg basada en la arquitectura de la misión Hayabusa pero con mejoras en navegación, comunicaciones y propulsión. Su estructura central aloja los sistemas de guiado, el módulo de propulsión iónica y la cápsula de retorno. Dos paneles solares de 6 metros de envergadura suministran la energía necesaria para los motores iónicos y los sistemas científicos. La comunicación con la Tierra se realiza mediante antenas en banda X y Ka, lo que permite transmitir datos científicos y telemetría con alta estabilidad incluso a grandes distancias heliocéntricas. El control de actitud combina ruedas de reacción, sensores estelares, sensores solares y un conjunto de propulsores de hidrazina para maniobras rápidas. La nave puede almacenar un gigabyte de datos en su memoria interna y opera de forma autónoma en fases críticas como aproximaciones, descensos y toma de muestras.
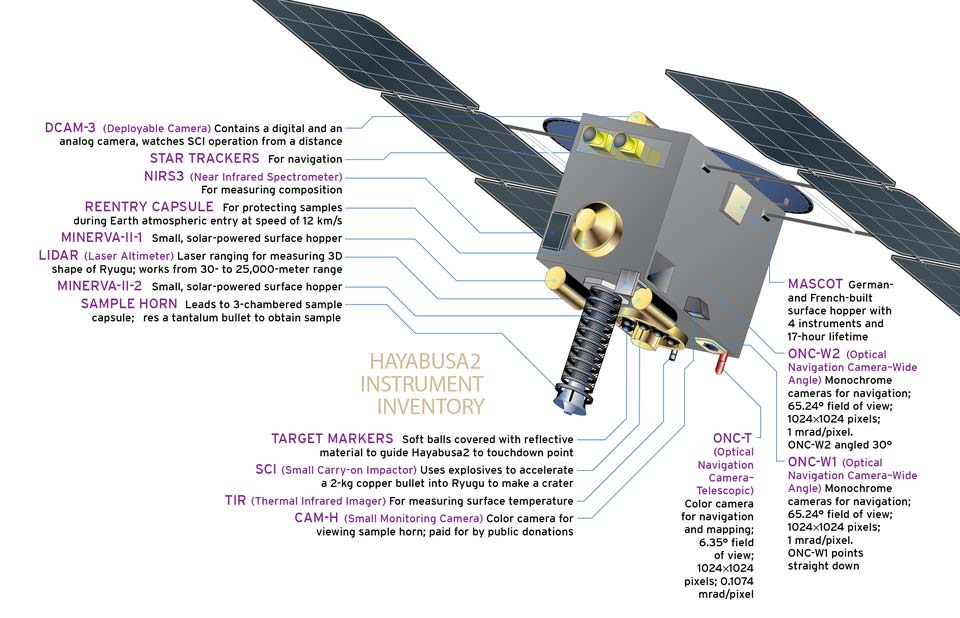
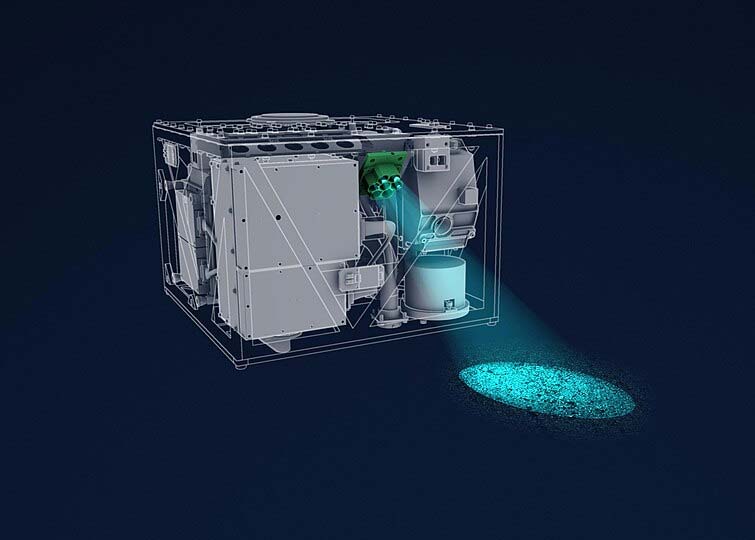
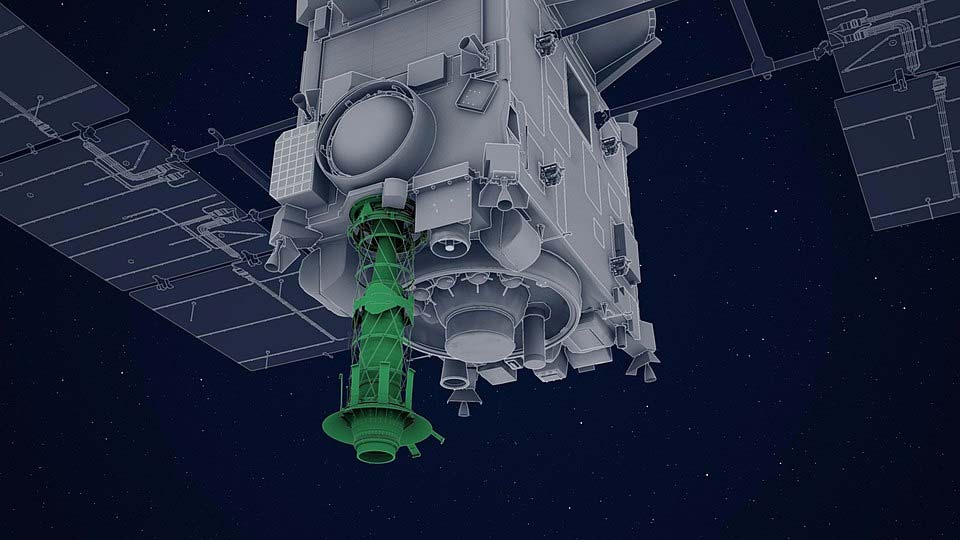
El sistema de propulsión iónica, formado por cuatro motores μ10 operados normalmente en grupos de dos o tres, proporcionó una delta-v acumulada de más de 1 km/s, esencial para alcanzar Ryugu y continuar la misión extendida. Para maniobras de corto impulso, la nave usa doce propulsores químicos de 20 newton. El mecanismo de recogida de muestras se basa en un tubo que contacta con la superficie y dispara un proyectil de tántalo para levantar regolito y fragmentos. Ese material asciende por el tubo hacia un contenedor rotatorio dividido en cámaras independientes que pueden sellarse tras cada intento de recogida. El sistema incluye capacidad de capturar gases liberados durante la operación. La cápsula de retorno, de 40 centímetros de diámetro, está diseñada para soportar una reentrada a 12 km/s y mantener las muestras en un entorno sellado y térmicamente estable.
Instrumentación científica
El conjunto óptico ONC incluye tres cámaras: ONC-T para imágenes multiespectrales de alta resolución y ONC-W1 y ONC-W2 para observación amplia y para monitorizar operaciones cercanas a la superficie. Estas cámaras permitieron cartografiar Ryugu, asistir en la navegación y documentar descensos, impactos y movimientos de los rovers.
El espectrómetro NIRS3 realiza observaciones en el infrarrojo cercano entre 1,8 y 3,2 micras para identificar minerales hidratados y compuestos orgánicos. La cámara térmica TIR mide la emisión entre 8 y 12 micras y proporciona datos sobre la inercia térmica y la distribución de temperaturas en la superficie. El altímetro láser LIDAR permite medir distancias con precisión métrica para navegación y modelado topográfico.
Cargas secundarias
La sonda transportó el experimento SCI, un impactador de 9,5 kg equipado con una carga hueca que genera un proyectil de cobre de 2,5 kg a 2 km/s. Su propósito fue exponer material subsuperficial para un muestreo adicional y para estudiar la cohesión y estructura interna de Ryugu. La cámara DCAM3, liberada antes del impacto, grabó el evento desde un punto de vista cercano para analizar la eyección de material.
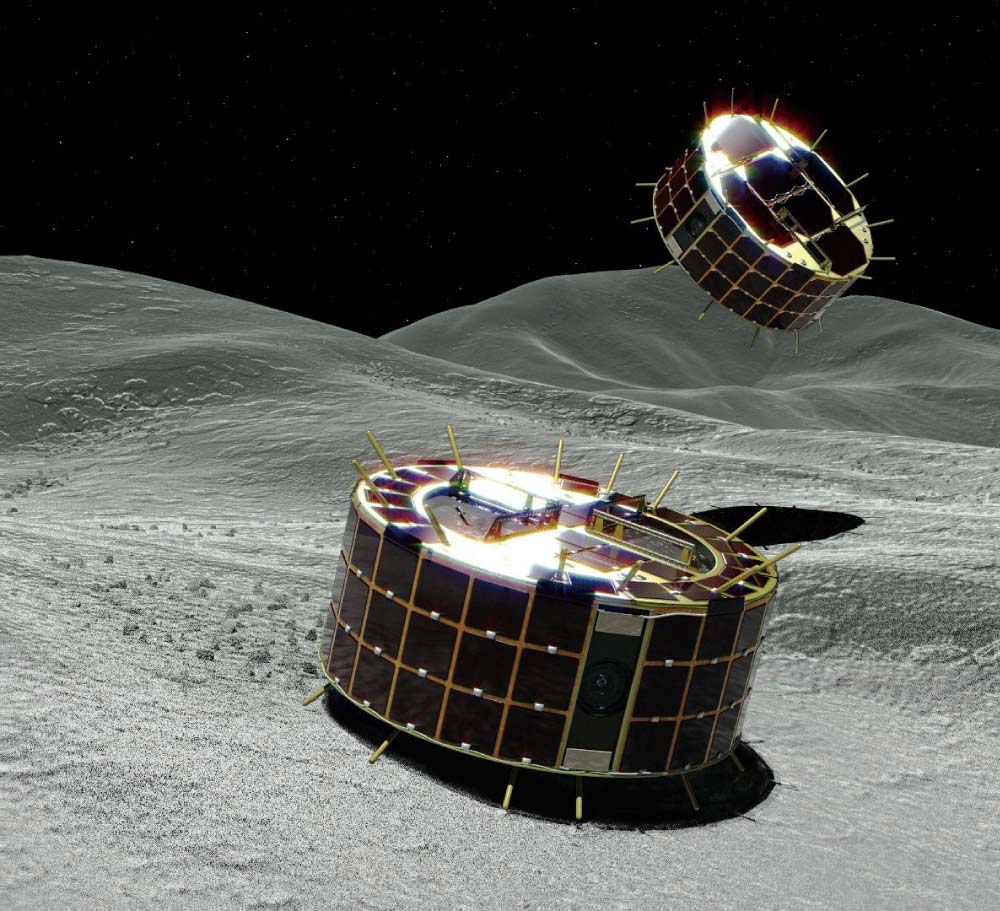
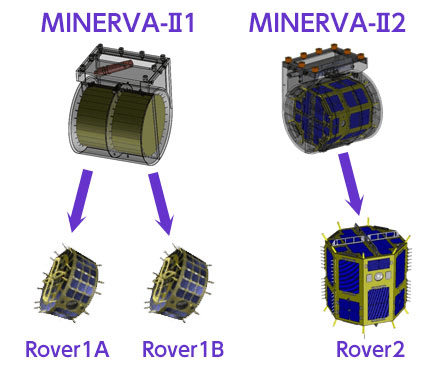
Además, Hayabusa 2 desplegó tres pequeños rovers. Los dos rovers MINERVA-II-1, de un kilogramo cada uno, se desplazaron mediante saltos controlados y realizaron imágenes y mediciones térmicas. La subsonda MASCOT, desarrollada por DLR y CNES, contenía una cámara, un microscopio infrarrojo, un radiómetro y un magnetómetro. Su autonomía limitada permitió caracterizar texturas, composición mineral y propiedades térmicas locales durante sus horas de operación.
Antecedentes de la misión Hayabusa 2
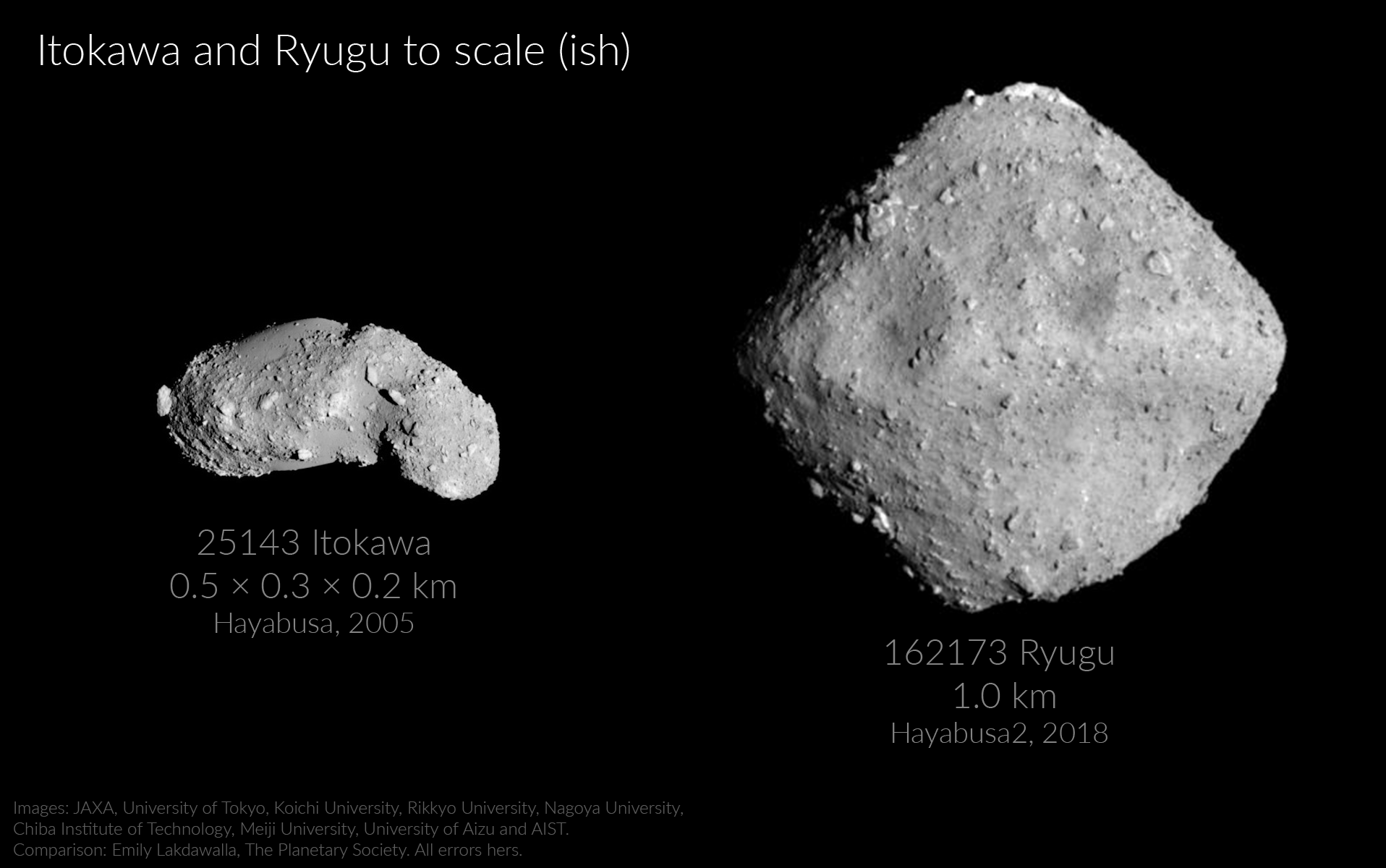
La misión Hayabusa demostró en 2010 que era posible traer a la Tierra material de un asteroide con una nave ligera y un presupuesto contenido, aunque su sistema de recogida presentó fallos que limitaron la cantidad recogida a unas pocas partículas de Itokawa. Aun así, la experiencia operativa adquirida resultó decisiva: mostró la necesidad de un mecanismo de muestreo más robusto, de un sistema de navegación óptica más fiable y de motores iónicos capaces de sostener trayectorias largas con menor riesgo de fallo. También reveló la importancia de disponer de cargas secundarias que pudieran operar en la superficie y complementar las observaciones orbitales.
La selección de Ryugu como destino respondió al interés por los asteroides de tipo C, cuyos materiales carbonáceos y volátiles se consideran representativos del estado químico temprano del Sistema Solar. El estudio de Bennu por OSIRIS-REx y de Ryugu por Hayabusa 2 forma parte de una estrategia internacional para comparar asteroides primitivos con distintos tamaños, densidades y entornos dinámicos. JAXA, tras el intento inicial de Hayabusa y el desarrollo paralelo de tecnologías de navegación en Akatsuki e IKAROS, concibió Hayabusa 2 como una misión de continuidad científica y maduración tecnológica. La combinación de propulsión iónica, capacidad de retorno de muestras y experimentos activos como el impactador SCI situó a la misión en un contexto de creciente interés por la defensa planetaria y por el estudio de los procesos de fragmentación y agregación en pequeños cuerpos.
Desarrollo de la misión Hayabusa 2
Lanzamiento de la misión Hayabusa 2 y primeras operaciones.
Hayabusa 2 despegó el 3 de diciembre de 2014 mediante un lanzador H-IIA 202 desde Tanegashima. Tras la inserción en trayectoria heliocéntrica, la nave completó las comprobaciones iniciales de comunicaciones, control de actitud y potencia. Los paneles solares se desplegaron sin incidencias y el sistema de navegación quedó operativo. Durante las primeras semanas se verificó el funcionamiento de los motores iónicos μ10 y se calibraron las cámaras ONC, el altímetro LIDAR y los instrumentos infrarrojos. La cápsula de retorno permaneció inactiva en su compartimento lateral mientras se configuraban las rutas de telemetría y el control térmico.

Fase de crucero y asistencia gravitatoria con la Tierra
El crucero se desarrolló mediante largos encendidos de los motores iónicos, intercalados con breves fases de navegación óptica y ajustes químicos. Entre marzo y mayo de 2016, y de nuevo entre noviembre de 2016 y abril de 2017, la nave acumuló la mayor parte de la delta-v necesaria para modificar su órbita y alinearla con la de Ryugu. El sobrevuelo de la Tierra del 3 de diciembre de 2015 proporcionó un cambio crítico de inclinación que habría sido muy costoso con propulsión química. La asistencia permitió situar la nave en un plano orbital compatible con el encuentro previsto y ajustar la geometría solar para garantizar potencia suficiente durante todo el crucero. En enero de 2018 comenzó el último tramo de empuje iónico, que concluyó en junio tras alcanzar los parámetros orbitales de aproximación finales.
Aproximación a Ryugu
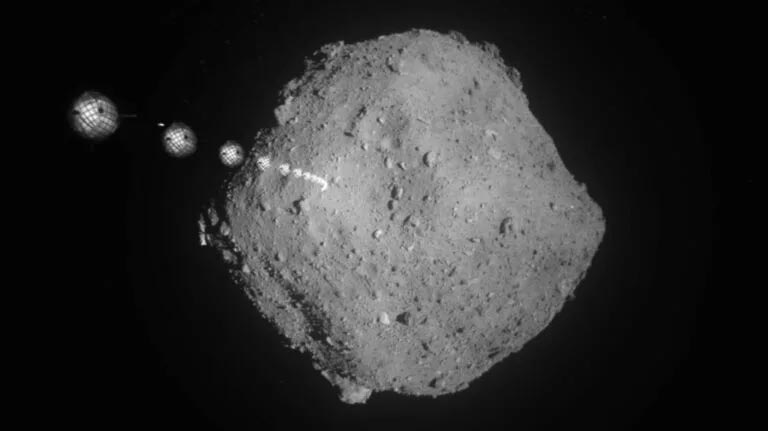
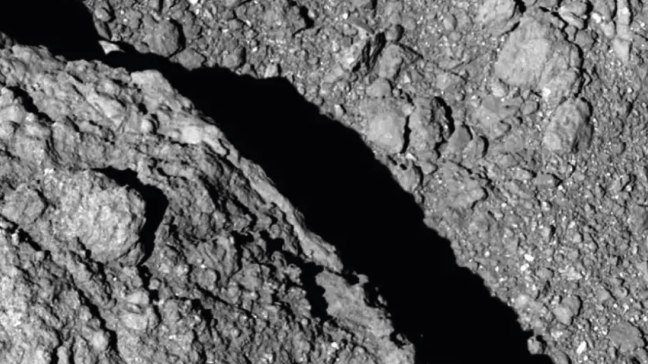
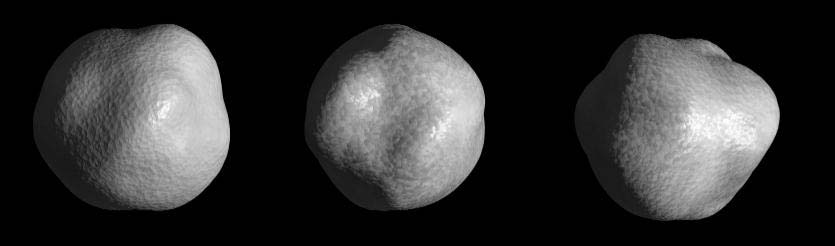
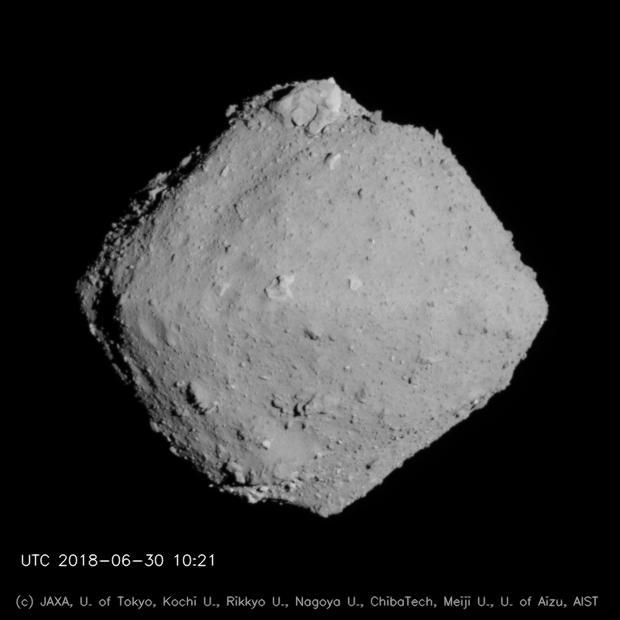
La detección del asteroide por las cámaras de navegación en febrero de 2018 marcó el inicio de la fase de aproximación. A partir de mayo, las imágenes sucesivas permitieron refinar la órbita de Ryugu, cuya posición tenía incertidumbres de centenares de kilómetros. La sonda tomó medidas de rotación, forma y brillo para construir modelos preliminares que guiarían la selección de zonas de descenso. El 27 de junio de 2018 Hayabusa 2 detuvo su velocidad relativa a unos 20 kilómetros del asteroide, entrando en la posición BOX-A, desde donde comenzó a caracterizar de manera sistemática la superficie mediante observación óptica, térmica y altimetría láser. Las primeras imágenes revelaron un cuerpo de tipo C con forma de rombo, abundante en bloques y con escasez de regolito fino, un factor que condicionaría todas las maniobras posteriores.
Operaciones en Ryugu y recogida de muestras
Durante meses, la nave alternó órbitas cercanas y descensos controlados para estudiar la superficie, medir su inercia térmica y construir modelos tridimensionales de precisión. Se comenzó por identificar zonas potenciales para el muestreo, restringidas a una franja ecuatorial que aseguraba iluminación estable y temperaturas dentro del margen operativo. La superficie rocosa obligó a descartar áreas grandes y a reducir el tamaño de las zonas permitidas a solo unos pocos metros de diámetro.
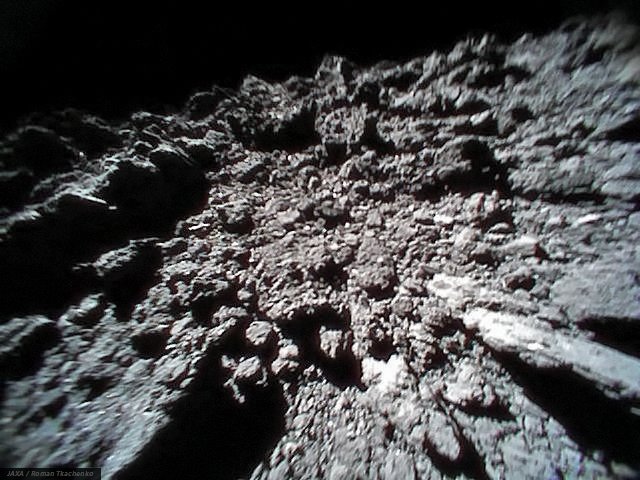
El 21 de septiembre de 2018 se liberaron los rovers MINERVA-II-1A y MINERVA-II-1B desde unos 55 metros de altura. Ambos se desplazaron mediante saltos breves y proporcionaron imágenes cercanas, datos térmicos y mediciones de textura superficial. El 3 de octubre se desplegó MASCOT, la subsonda del DLR y CNES, que operó durante unas 17 horas gracias a su batería. Sus datos incluyeron análisis microscópicos, caracterización térmica y medición del campo magnético local. El rover MINERVA-II-2, liberado más tarde, experimentó un fallo previo, pero su liberación permitió obtener datos dinámicos sobre el entorno gravitatorio del asteroide.

En paralelo, la nave realizó descensos cercanos para posicionar y verificar los target markers, esferas reflectantes usadas para navegación óptica durante la toma de muestras. Las maniobras TD-R1, TD-R1A y TD-R3 sirvieron para validar el sistema LIDAR y el seguimiento del marcador sobre un terreno con fuerte inclinación y abundancia de bloques.


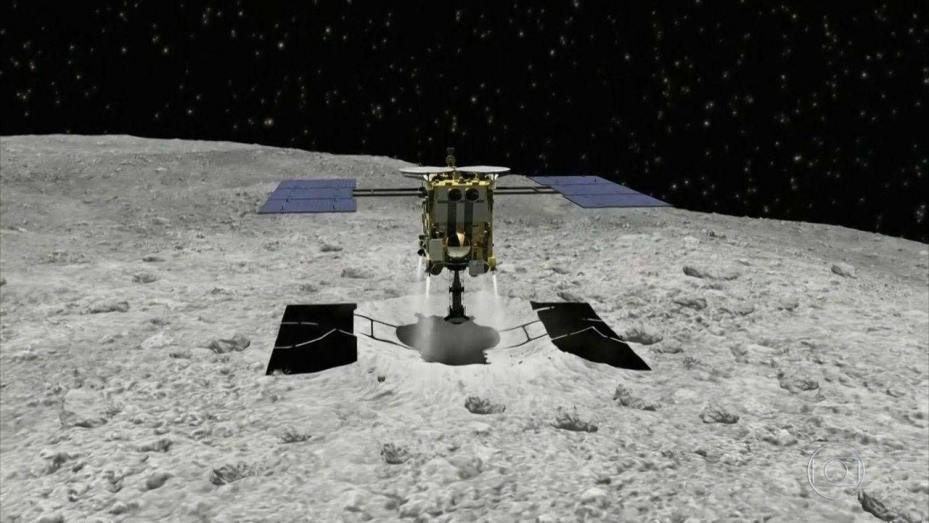
El primer muestreo se realizó el 21 de febrero de 2019 en la zona L08-E1, posteriormente denominada Tamatebako. La nave descendió guiada por navegación óptica y LIDAR hasta que el sensor de contacto del tubo SMP detectó la superficie. En ese instante se disparó un proyectil de tántalo de 5 gramos que levantó fragmentos y polvo, parte de los cuales ascendieron por el tubo hacia la cámara A del contenedor de muestras. La nave se retiró de inmediato mediante un impulso vertical para evitar el riesgo de vuelco en la superficie.
El 5 de abril de 2019 se activó el experimento SCI. La nave liberó el impactador, se colocó tras el asteroide para protegerse de la eyección y desplegó la cámara autónoma DCAM3. La carga hueca generó un proyectil de cobre de 2,5 kg que impactó a 2 km/s y creó un cráter de varios metros. Las imágenes de DCAM3 mostraron la expansión del material expulsado y aportaron datos sobre resistencia y cohesión de la superficie.
Tras analizar el cráter, el equipo decidió ejecutar un segundo muestreo para obtener material no expuesto a la radiación solar. El 11 de julio de 2019 la nave repitió la maniobra de descenso, esta vez hacia la zona del nuevo cráter. El proyectil volvió a generar fragmentos que fueron capturados en la cámara C del contenedor. Se descartó un tercer intento para minimizar riesgos después de dos operaciones exitosas.
Retorno de muestras y reentrada en la Tierra
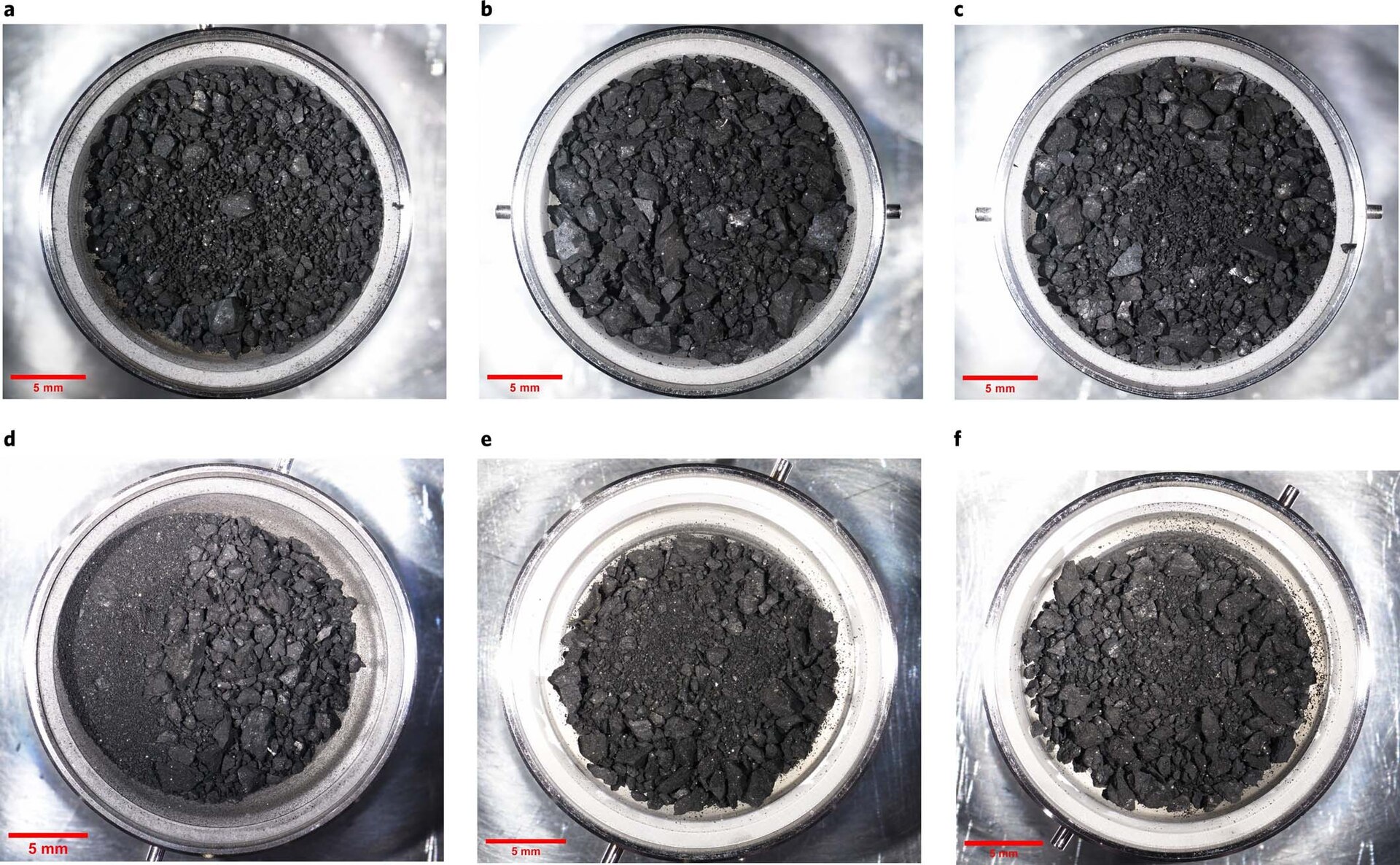
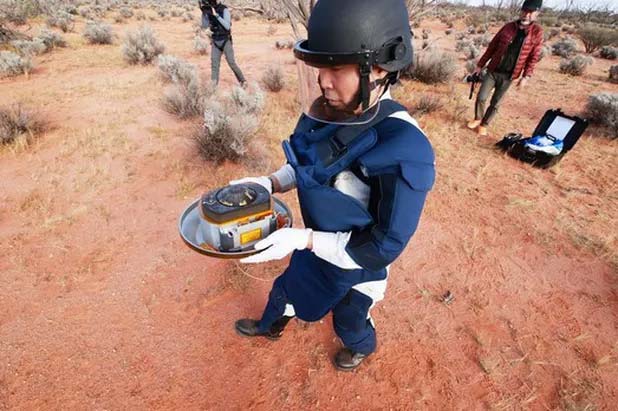
La sonda abandonó Ryugu el 13 de noviembre de 2019 e inició el viaje de regreso con propulsión iónica. Tras meses de ajustes, liberó la cápsula de retorno el 5 de diciembre de 2020 a unos 220.000 kilómetros de la Tierra. La cápsula entró en la atmósfera a 12 km/s, desplegó su paracaídas y aterrizó en la zona controlada de Woomera, Australia. Fue recuperada pocas horas después y trasladada a las instalaciones de análisis inicial en Sagamihara. Allí se confirmó la presencia de regolito oscuro y fragmentos milimétricos con una masa total de 5,4 gramos.
Misión extendida: estado actual y sobrevuelos previstos
Tras liberar la cápsula, la nave realizó una maniobra para evitar la atmósfera terrestre y continuó su trayectoria interplanetaria. El primer objetivo de la misión extendida será el sobrevuelo del asteroide 98943 Torifune en julio de 2026, donde realizará observación óptica y mediciones de rotación y forma. A continuación, realizará dos nuevas asistencias gravitatorias con la Tierra en 2027 y 2028 para alcanzar el asteroide 1998 KY26 en 2031. Este cuerpo, de apenas 30 metros de diámetro y rotación rápida, será el objeto más pequeño estudiado de cerca por una sonda. La misión proporcionará datos sobre la estructura y dinámica de asteroides ultracompactos, relevantes para modelos de evolución por colisión y para estrategias de mitigación de impactos.
Cronología de la misión Hayabusa 2
| Lanzamiento | 3 de diciembre de 2014 |
| Asistencia gravitatoria con la Tierra | 3 de diciembre de 2015 |
| Llegada a Ryugu | 27 de junio de 2018 |
| Despliegue de los rovers MINERVA-II-1A y 1B | 21 de septiembre de 2018 |
| Despliegue de la subsonda MASCOT | 3 de octubre de 2018 |
| Primer muestreo (TD1) | 21 de febrero de 2019 |
| Impacto del SCI y observación con DCAM3 | 5 de abril de 2019 |
| Segundo muestreo (TD2) | 11 de julio de 2019 |
| Salida de Ryugu | 13 de noviembre de 2019 |
| Liberación de la cápsula de retorno | 5 de diciembre de 2020 |
| Aterrizaje de la cápsula en Woomera | 6 de diciembre de 2020 |
| Sobrevuelo previsto de Torifune | julio de 2026 |
| Asistencias gravitatorias con la Tierra | 2027 y 2028 |
| Encuentro previsto con 1998 KY26 | julio de 2031 |
Galería de imágenes de la misión Hayabusa 2


Créditos: JAXA.





Referencias y más información:
- Hayabusa 2 Extended Mission – Web de la misión de JAXA
- Hayabusa 2 – Web en NASA Science
- MASCOT – Web del instrumento de DLR
Misiones a asteroides operativas: